Foreword
看一下官方的ESP32 经典蓝牙 HID是什么样的架构,以及如何修改HID
硬件
需要注意的是ESP32,必须是不带任何后缀的,才具有双模,S和C系列的都是单BLE蓝牙,无法使用经典蓝牙
Example
先看官方例程,经典蓝牙还是给了不少例子的,主要看一下bt_hid_mouse_device是如何实现的就行了
app_main
参数初始化
一上来就是各种参数初始化
s_local_param.app_param.name = "Mouse";
s_local_param.app_param.description = "Mouse Example";
s_local_param.app_param.provider = "ESP32";
s_local_param.app_param.subclass = ESP_HID_CLASS_MIC;
s_local_param.app_param.desc_list = hid_descriptor_mouse_boot_mode;
s_local_param.app_param.desc_list_len = hid_descriptor_mouse_boot_mode_len;
memset(&s_local_param.both_qos, 0, sizeof(esp_hidd_qos_param_t)); // don't set the qos parameters
s_local_param.protocol_mode = ESP_HIDD_REPORT_MODE;
看一下初始化的结构体是什么,主要是对app参数进行初始化的
typedef struct
{
esp_hidd_app_param_t app_param;
esp_hidd_qos_param_t both_qos;
uint8_t protocol_mode;
SemaphoreHandle_t mouse_mutex;
xTaskHandle mouse_task_hdl;
uint8_t buffer[4];
int8_t x_dir;
} local_param_t;
static local_param_t s_local_param = {0};
再看一下app对象是怎么定义的
/**
* @brief HIDD characteristics for SDP report
*/
typedef struct {
const char *name;
const char *description;
const char *provider;
uint8_t subclass;
uint8_t *desc_list;
int desc_list_len;
} esp_hidd_app_param_t;
这里面主要关注一下subclass的初始化,他是定义HID设备的类型的,可以看到对应的子类有这么多,对应不同设备
/* sub_class of hid device */
#define ESP_HID_CLASS_UNKNOWN (0x00<<2)
#define ESP_HID_CLASS_JOS (0x01<<2) /* joy stick */
#define ESP_HID_CLASS_GPD (0x02<<2) /* game pad */
#define ESP_HID_CLASS_RMC (0x03<<2) /* remote control */
#define ESP_HID_CLASS_SED (0x04<<2) /* sensing device */
#define ESP_HID_CLASS_DGT (0x05<<2) /* Digitizer tablet */
#define ESP_HID_CLASS_CDR (0x06<<2) /* card reader */
#define ESP_HID_CLASS_KBD (0x10<<2) /* keyboard */
#define ESP_HID_CLASS_MIC (0x20<<2) /* pointing device */
#define ESP_HID_CLASS_COM (0x30<<2) /* Combo keyboard/pointing */
接着就是desc_list设备描述符,这里就是普通键鼠HID设备的描述了,后面再详细看这个内容
// a generic mouse descriptor
uint8_t hid_descriptor_mouse_boot_mode[] = {
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x02, // USAGE (Mouse)
0xa1, 0x01, // COLLECTION (Application)
0x09, 0x01, // USAGE (Pointer)
0xa1, 0x00, // COLLECTION (Physical)
0x05, 0x09, // USAGE_PAGE (Button)
0x19, 0x01, // USAGE_MINIMUM (Button 1)
0x29, 0x03, // USAGE_MAXIMUM (Button 3)
0x15, 0x00, // LOGICAL_MINIMUM (0)
0x25, 0x01, // LOGICAL_MAXIMUM (1)
0x95, 0x03, // REPORT_COUNT (3)
0x75, 0x01, // REPORT_SIZE (1)
0x81, 0x02, // INPUT (Data,Var,Abs)
0x95, 0x01, // REPORT_COUNT (1)
0x75, 0x05, // REPORT_SIZE (5)
0x81, 0x03, // INPUT (Cnst,Var,Abs)
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x30, // USAGE (X)
0x09, 0x31, // USAGE (Y)
0x09, 0x38, // USAGE (Wheel)
0x15, 0x81, // LOGICAL_MINIMUM (-127)
0x25, 0x7f, // LOGICAL_MAXIMUM (127)
0x75, 0x08, // REPORT_SIZE (8)
0x95, 0x03, // REPORT_COUNT (3)
0x81, 0x06, // INPUT (Data,Var,Rel)
0xc0, // END_COLLECTION
0xc0 // END_COLLECTION
};
qos则是没有设置,这里主要是给SDP服务和I2cap的设置服务质量的
/**
* @brief HIDD Quality of Service parameters
*/
typedef struct {
uint8_t service_type;
uint32_t token_rate;
uint32_t token_bucket_size;
uint32_t peak_bandwidth;
uint32_t access_latency;
uint32_t delay_variation;
} esp_hidd_qos_param_t;
设置HID设备的模式,使用Report的模式,这个地方可能说的不是那么明白,这里其实说这个设备可以在什么时间被加载。如果是boot模式,就是说计算机或者其他设备,在boot阶段就可以完整加载这个设备并且使用了,而report则是表示只有在系统启动以后才能正常使用这个设备。
对应到PC这边就是设置这个设备可以不可以在BIOS中使用,有些设备是不支持BIOS中使用的
/**
* @brief HID device protocol modes
*/
typedef enum {
ESP_HIDD_REPORT_MODE = 0x00,
ESP_HIDD_BOOT_MODE = 0x01,
ESP_HIDD_UNSUPPORTED_MODE = 0xff
} esp_hidd_protocol_mode_t;
常规设备初始化
常规的nvs初始化,简单说就是类似stm32中的flash,esp这边是使用nvs模拟兼容e2prom的操作
ret = nvs_flash_init();
if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND) {
ESP_ERROR_CHECK(nvs_flash_erase());
ret = nvs_flash_init();
}
ESP_ERROR_CHECK( ret );
蓝牙初始化
// 释放ble蓝牙controllor的内存,蓝牙初始化前必须要释放
ESP_ERROR_CHECK(esp_bt_controller_mem_release(ESP_BT_MODE_BLE));
// 这里是直接检测是否配置了蓝牙,没有的话会报错提示
esp_bt_controller_config_t bt_cfg = BT_CONTROLLER_INIT_CONFIG_DEFAULT();
if ((ret = esp_bt_controller_init(&bt_cfg)) != ESP_OK) {
ESP_LOGE(TAG, "initialize controller failed: %s\n", esp_err_to_name(ret));
return;
}
// 启用经典蓝牙
if ((ret = esp_bt_controller_enable(ESP_BT_MODE_CLASSIC_BT)) != ESP_OK) {
ESP_LOGE(TAG, "enable controller failed: %s\n", esp_err_to_name(ret));
return;
}
// bluedroid 蓝牙协议栈初始化
if ((ret = esp_bluedroid_init()) != ESP_OK) {
ESP_LOGE(TAG, "initialize bluedroid failed: %s\n", esp_err_to_name(ret));
return;
}
// bluedroid 蓝牙协议栈使能
if ((ret = esp_bluedroid_enable()) != ESP_OK) {
ESP_LOGE(TAG, "enable bluedroid failed: %s\n", esp_err_to_name(ret));
return;
}
// 注册蓝牙回调
if ((ret = esp_bt_gap_register_callback(esp_bt_gap_cb)) != ESP_OK) {
ESP_LOGE(TAG, "gap register failed: %s\n", esp_err_to_name(ret));
return;
}
蓝牙启用的时候,可以看到本身也能支持双模
/**
* @brief Bluetooth mode for controller enable/disable
*/
typedef enum {
ESP_BT_MODE_IDLE = 0x00, /*!< Bluetooth is not running */
ESP_BT_MODE_BLE = 0x01, /*!< Run BLE mode */
ESP_BT_MODE_CLASSIC_BT = 0x02, /*!< Run Classic BT mode */
ESP_BT_MODE_BTDM = 0x03, /*!< Run dual mode */
} esp_bt_mode_t;
这个回调已经把状态写死了,是蓝牙使能成功以后,就会回调这个函数
/**
* @brief register callback function. This function should be called after esp_bluedroid_enable() completes successfully
*
* @return
* - ESP_OK : Succeed
* - ESP_FAIL: others
*/
esp_err_t esp_bt_gap_register_callback(esp_bt_gap_cb_t callback);
gap这里负责整个蓝牙配对的过程回调,仔细看一下gap回调的内容
void esp_bt_gap_cb(esp_bt_gap_cb_event_t event, esp_bt_gap_cb_param_t *param)
{
const char* TAG = "esp_bt_gap_cb";
switch (event) {
// 蓝牙匹配授权成功
case ESP_BT_GAP_AUTH_CMPL_EVT:{
if (param->auth_cmpl.stat == ESP_BT_STATUS_SUCCESS) {
ESP_LOGI(TAG, "authentication success: %s", param->auth_cmpl.device_name);
esp_log_buffer_hex(TAG, param->auth_cmpl.bda, ESP_BD_ADDR_LEN);
} else {
ESP_LOGE(TAG, "authentication failed, status:%d", param->auth_cmpl.stat);
}
break;
}
// 这里定义的是蓝牙配对请求密码
case ESP_BT_GAP_PIN_REQ_EVT:{
ESP_LOGI(TAG, "ESP_BT_GAP_PIN_REQ_EVT min_16_digit:%d", param->pin_req.min_16_digit);
if (param->pin_req.min_16_digit) {
ESP_LOGI(TAG, "Input pin code: 0000 0000 0000 0000");
esp_bt_pin_code_t pin_code = {0};
esp_bt_gap_pin_reply(param->pin_req.bda, true, 16, pin_code);
} else {
ESP_LOGI(TAG, "Input pin code: 1234");
esp_bt_pin_code_t pin_code;
pin_code[0] = '1';
pin_code[1] = '2';
pin_code[2] = '3';
pin_code[3] = '4';
esp_bt_gap_pin_reply(param->pin_req.bda, true, 4, pin_code);
}
break;
}
// 如果使能了Secure Simple Pairing 安全配对模式
#if (CONFIG_BT_SSP_ENABLED == true)
case ESP_BT_GAP_CFM_REQ_EVT:
ESP_LOGI(TAG, "ESP_BT_GAP_CFM_REQ_EVT Please compare the numeric value: %d", param->cfm_req.num_val);
esp_bt_gap_ssp_confirm_reply(param->cfm_req.bda, true);
break;
case ESP_BT_GAP_KEY_NOTIF_EVT:
ESP_LOGI(TAG, "ESP_BT_GAP_KEY_NOTIF_EVT passkey:%d", param->key_notif.passkey);
break;
case ESP_BT_GAP_KEY_REQ_EVT:
ESP_LOGI(TAG, "ESP_BT_GAP_KEY_REQ_EVT Please enter passkey!");
break;
#endif
case ESP_BT_GAP_MODE_CHG_EVT:
ESP_LOGI(TAG, "ESP_BT_GAP_MODE_CHG_EVT mode:%d", param->mode_chg.mode);
break;
default:
ESP_LOGI(TAG, "event: %d", event);
break;
}
return;
}
具体GAP响应的事件都在这里,ESP_BT_GAP_MODE_CHG_EVT在这里没有任何说明,不是很明白到底是切换了什么模式
/// BT GAP callback events
typedef enum {
ESP_BT_GAP_DISC_RES_EVT = 0, /*!< Device discovery result event */
ESP_BT_GAP_DISC_STATE_CHANGED_EVT, /*!< Discovery state changed event */
ESP_BT_GAP_RMT_SRVCS_EVT, /*!< Get remote services event */
ESP_BT_GAP_RMT_SRVC_REC_EVT, /*!< Get remote service record event */
ESP_BT_GAP_AUTH_CMPL_EVT, /*!< Authentication complete event */
ESP_BT_GAP_PIN_REQ_EVT, /*!< Legacy Pairing Pin code request */
ESP_BT_GAP_CFM_REQ_EVT, /*!< Security Simple Pairing User Confirmation request. */
ESP_BT_GAP_KEY_NOTIF_EVT, /*!< Security Simple Pairing Passkey Notification */
ESP_BT_GAP_KEY_REQ_EVT, /*!< Security Simple Pairing Passkey request */
ESP_BT_GAP_READ_RSSI_DELTA_EVT, /*!< Read rssi event */
ESP_BT_GAP_CONFIG_EIR_DATA_EVT, /*!< Config EIR data event */
ESP_BT_GAP_SET_AFH_CHANNELS_EVT, /*!< Set AFH channels event */
ESP_BT_GAP_READ_REMOTE_NAME_EVT, /*!< Read Remote Name event */
ESP_BT_GAP_MODE_CHG_EVT,
ESP_BT_GAP_REMOVE_BOND_DEV_COMPLETE_EVT, /*!< remove bond device complete event */
ESP_BT_GAP_QOS_CMPL_EVT, /*!< QOS complete event */
ESP_BT_GAP_EVT_MAX,
} esp_bt_gap_cb_event_t;
HID初始化
ESP_LOGI(TAG, "setting device name");
// 设置蓝牙设备名称
esp_bt_dev_set_device_name("HID Mouse Example");
ESP_LOGI(TAG, "setting cod major, peripheral");
esp_bt_cod_t cod;
cod.major = ESP_BT_COD_MAJOR_DEV_PERIPHERAL;
// 设置主设备类型
esp_bt_gap_set_cod(cod ,ESP_BT_SET_COD_MAJOR_MINOR);
vTaskDelay(2000 / portTICK_PERIOD_MS);
ESP_LOGI(TAG, "register hid device callback");
// hid的回调
esp_bt_hid_device_register_callback(esp_bt_hidd_cb);
ESP_LOGI(TAG, "starting hid device");
esp_bt_hid_device_init();
#if (CONFIG_BT_SSP_ENABLED == true)
/* Set default parameters for Secure Simple Pairing */
esp_bt_sp_param_t param_type = ESP_BT_SP_IOCAP_MODE;
esp_bt_io_cap_t iocap = ESP_BT_IO_CAP_NONE;
esp_bt_gap_set_security_param(param_type, &iocap, sizeof(uint8_t));
#endif
/*
* Set default parameters for Legacy Pairing
* Use variable pin, input pin code when pairing
*/
esp_bt_pin_type_t pin_type = ESP_BT_PIN_TYPE_VARIABLE;
esp_bt_pin_code_t pin_code;
esp_bt_gap_set_pin(pin_type, 0, pin_code);
print_bt_address();
ESP_LOGI(TAG, "exiting");
这个地方需要注意一下,vTaskDelay(2000)和vTaskDelay(2000 / portTICK_PERIOD_MS)是不同的时间,前者大概是后者的10倍,前者是基于systick的,而后者是基于物理时间ms的,搞错的话会导致运行时间不正确的。
vTaskDelay(2000 / portTICK_PERIOD_MS);
设置蓝牙设备类型
/// Class of device
typedef struct {
uint32_t reserved_2: 2; /*!< undefined */
uint32_t minor: 6; /*!< minor class */
uint32_t major: 5; /*!< major class */
uint32_t service: 11; /*!< service class */
uint32_t reserved_8: 8; /*!< undefined */
} esp_bt_cod_t;
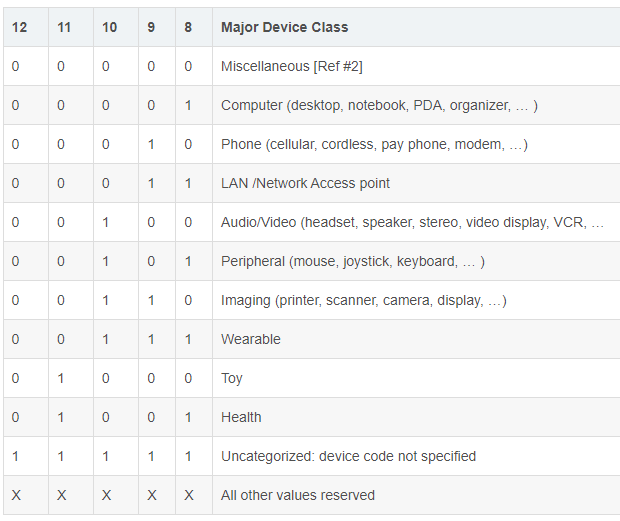
蓝牙设备类字段,这里是鼠标,所以就是外设类型
/// Major device class field of Class of Device
typedef enum {
ESP_BT_COD_MAJOR_DEV_MISC = 0, /*!< Miscellaneous */
ESP_BT_COD_MAJOR_DEV_COMPUTER = 1, /*!< Computer */
ESP_BT_COD_MAJOR_DEV_PHONE = 2, /*!< Phone(cellular, cordless, pay phone, modem */
ESP_BT_COD_MAJOR_DEV_LAN_NAP = 3, /*!< LAN, Network Access Point */
ESP_BT_COD_MAJOR_DEV_AV = 4, /*!< Audio/Video(headset, speaker, stereo, video display, VCR */
ESP_BT_COD_MAJOR_DEV_PERIPHERAL = 5, /*!< Peripheral(mouse, joystick, keyboard) */
ESP_BT_COD_MAJOR_DEV_IMAGING = 6, /*!< Imaging(printer, scanner, camera, display */
ESP_BT_COD_MAJOR_DEV_WEARABLE = 7, /*!< Wearable */
ESP_BT_COD_MAJOR_DEV_TOY = 8, /*!< Toy */
ESP_BT_COD_MAJOR_DEV_HEALTH = 9, /*!< Health */
ESP_BT_COD_MAJOR_DEV_UNCATEGORIZED = 31, /*!< Uncategorized: device not specified */
} esp_bt_cod_major_dev_t;
cod结构体


Major有以下几种:
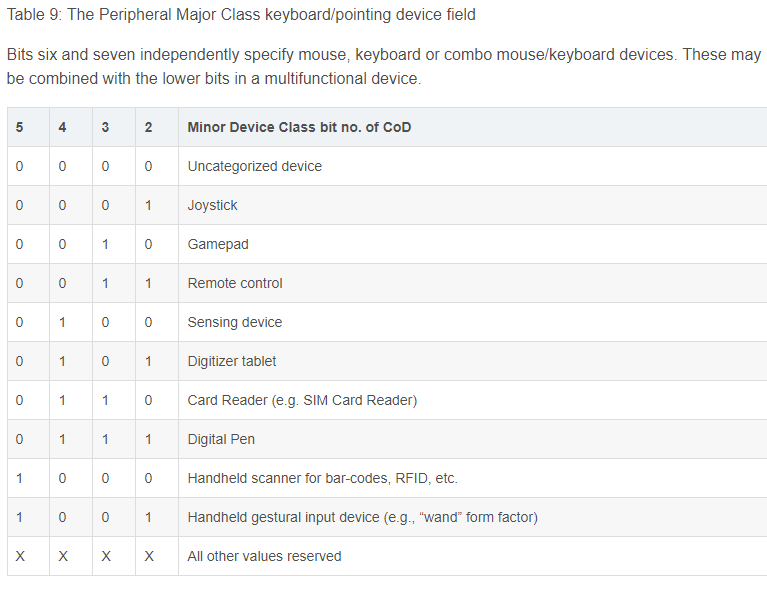
Minor的类型比较多,他是根据Major的不同而不同的
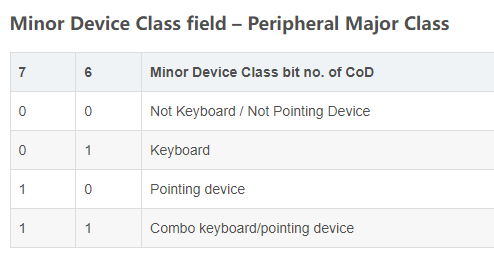
第六位和第七位特指了鼠标、键盘或者混合设备或者两者都不是的设备,算是大的设备种类吧,然后在这个种类的情况下,再叠加上第2345位决定这个设备具体是哪种。Minor一般不是很重要,很多地方都会省略他。
最后是一点设置配对pin的类型,如果设置成了ESP_BT_PIN_TYPE_VARIABLE,那么pin最终是由GAP部分给出来,否则的话就是固定值,不会回调GAP部分的pin request
typedef enum{
ESP_BT_PIN_TYPE_VARIABLE = 0, /*!< Refer to BTM_PIN_TYPE_VARIABLE */
ESP_BT_PIN_TYPE_FIXED = 1, /*!< Refer to BTM_PIN_TYPE_FIXED */
} esp_bt_pin_type_t;
HID的回调函数,整个HID的事务处理就看这个里面了
void esp_bt_hidd_cb(esp_hidd_cb_event_t event, esp_hidd_cb_param_t *param)
{
static const char* TAG = "esp_bt_hidd_cb";
switch (event) {
case ESP_HIDD_INIT_EVT:
// HID初始化的时候,使用了前面填充的app和qos的设置
if (param->init.status == ESP_HIDD_SUCCESS) {
ESP_LOGI(TAG, "setting hid parameters");
// 当注册成功以后就会触发下面的事件ESP_HIDD_REGISTER_APP_EVT
esp_bt_hid_device_register_app(&s_local_param.app_param, &s_local_param.both_qos, &s_local_param.both_qos);
} else {
ESP_LOGE(TAG, "init hidd failed!");
}
break;
case ESP_HIDD_DEINIT_EVT:
break;
case ESP_HIDD_REGISTER_APP_EVT:
// 当HID初始化成功以后,调用gap,设置为可连接状态并且可以被发现
if (param->register_app.status == ESP_HIDD_SUCCESS) {
ESP_LOGI(TAG, "setting hid parameters success!");
ESP_LOGI(TAG, "setting to connectable, discoverable");
esp_bt_gap_set_scan_mode(ESP_BT_CONNECTABLE, ESP_BT_GENERAL_DISCOVERABLE);
if (param->register_app.in_use && param->register_app.bd_addr != NULL) {
ESP_LOGI(TAG, "start virtual cable plug!");
// 当连接成功以后,会回调下面的ESP_HIDD_OPEN_EVT
esp_bt_hid_device_connect(param->register_app.bd_addr);
}
} else {
ESP_LOGE(TAG, "setting hid parameters failed!");
}
break;
case ESP_HIDD_UNREGISTER_APP_EVT:
if (param->unregister_app.status == ESP_HIDD_SUCCESS) {
ESP_LOGI(TAG, "unregister app success!");
} else {
ESP_LOGE(TAG, "unregister app failed!");
}
break;
case ESP_HIDD_OPEN_EVT:
if (param->open.status == ESP_HIDD_SUCCESS) {
if (param->open.conn_status == ESP_HIDD_CONN_STATE_CONNECTING) {
ESP_LOGI(TAG, "connecting...");
} else if (param->open.conn_status == ESP_HIDD_CONN_STATE_CONNECTED) {
ESP_LOGI(TAG, "connected to %02x:%02x:%02x:%02x:%02x:%02x", param->open.bd_addr[0],
param->open.bd_addr[1], param->open.bd_addr[2], param->open.bd_addr[3], param->open.bd_addr[4],
param->open.bd_addr[5]);
// 当连接建立以后,启动hid任务,然后设置为不可连接状态并且不可发现
bt_app_task_start_up();
ESP_LOGI(TAG, "making self non-discoverable and non-connectable.");
esp_bt_gap_set_scan_mode(ESP_BT_NON_CONNECTABLE, ESP_BT_NON_DISCOVERABLE);
} else {
ESP_LOGE(TAG, "unknown connection status");
}
} else {
ESP_LOGE(TAG, "open failed!");
}
break;
case ESP_HIDD_CLOSE_EVT:
ESP_LOGI(TAG, "ESP_HIDD_CLOSE_EVT");
if (param->close.status == ESP_HIDD_SUCCESS) {
if (param->close.conn_status == ESP_HIDD_CONN_STATE_DISCONNECTING) {
ESP_LOGI(TAG, "disconnecting...");
} else if (param->close.conn_status == ESP_HIDD_CONN_STATE_DISCONNECTED) {
// hid接口关闭以后,停止任务,再次切换为可搜索状态
ESP_LOGI(TAG, "disconnected!");
bt_app_task_shut_down();
ESP_LOGI(TAG, "making self discoverable and connectable again.");
esp_bt_gap_set_scan_mode(ESP_BT_CONNECTABLE, ESP_BT_GENERAL_DISCOVERABLE);
} else {
ESP_LOGE(TAG, "unknown connection status");
}
} else {
ESP_LOGE(TAG, "close failed!");
}
break;
case ESP_HIDD_SEND_REPORT_EVT:
// report发送完成回调标志
ESP_LOGI(TAG, "ESP_HIDD_SEND_REPORT_EVT id:0x%02x, type:%d", param->send_report.report_id,
param->send_report.report_type);
break;
case ESP_HIDD_REPORT_ERR_EVT:
ESP_LOGI(TAG, "ESP_HIDD_REPORT_ERR_EVT");
break;
case ESP_HIDD_GET_REPORT_EVT:
// 收到report
ESP_LOGI(TAG, "ESP_HIDD_GET_REPORT_EVT id:0x%02x, type:%d, size:%d", param->get_report.report_id,
param->get_report.report_type, param->get_report.buffer_size);
if (check_report_id_type(param->get_report.report_id, param->get_report.report_type)) {
// 这里还用信号量锁了一下,防止多线程冲突
xSemaphoreTake(s_local_param.mouse_mutex, portMAX_DELAY);
if (s_local_param.protocol_mode == ESP_HIDD_REPORT_MODE) {
// 不同设备模式,发送的report id不同
esp_bt_hid_device_send_report(param->get_report.report_type, 0x00, 4, s_local_param.buffer);
} else if (s_local_param.protocol_mode == ESP_HIDD_BOOT_MODE) {
esp_bt_hid_device_send_report(param->get_report.report_type, 0x02, 3, s_local_param.buffer);
}
xSemaphoreGive(s_local_param.mouse_mutex);
} else {
ESP_LOGE(TAG, "check_report_id failed!");
}
break;
case ESP_HIDD_SET_REPORT_EVT:
ESP_LOGI(TAG, "ESP_HIDD_SET_REPORT_EVT");
break;
case ESP_HIDD_SET_PROTOCOL_EVT:
ESP_LOGI(TAG, "ESP_HIDD_SET_PROTOCOL_EVT");
// 这里是处理HID切换设备模式
if (param->set_protocol.protocol_mode == ESP_HIDD_BOOT_MODE) {
ESP_LOGI(TAG, " - boot protocol");
xSemaphoreTake(s_local_param.mouse_mutex, portMAX_DELAY);
s_local_param.x_dir = -1;
xSemaphoreGive(s_local_param.mouse_mutex);
} else if (param->set_protocol.protocol_mode == ESP_HIDD_REPORT_MODE) {
ESP_LOGI(TAG, " - report protocol");
}
xSemaphoreTake(s_local_param.mouse_mutex, portMAX_DELAY);
s_local_param.protocol_mode = param->set_protocol.protocol_mode;
xSemaphoreGive(s_local_param.mouse_mutex);
break;
case ESP_HIDD_INTR_DATA_EVT:
ESP_LOGI(TAG, "ESP_HIDD_INTR_DATA_EVT");
break;
case ESP_HIDD_VC_UNPLUG_EVT:
ESP_LOGI(TAG, "ESP_HIDD_VC_UNPLUG_EVT");
if (param->vc_unplug.status == ESP_HIDD_SUCCESS) {
if (param->close.conn_status == ESP_HIDD_CONN_STATE_DISCONNECTED) {
ESP_LOGI(TAG, "disconnected!");
// 断开了HID 再次变成可检测状态
bt_app_task_shut_down();
ESP_LOGI(TAG, "making self discoverable and connectable again.");
esp_bt_gap_set_scan_mode(ESP_BT_CONNECTABLE, ESP_BT_GENERAL_DISCOVERABLE);
} else {
ESP_LOGE(TAG, "unknown connection status");
}
} else {
ESP_LOGE(TAG, "close failed!");
}
break;
default:
break;
}
}
HID的task
void bt_app_task_start_up(void)
{
s_local_param.mouse_mutex = xSemaphoreCreateMutex();
memset(s_local_param.buffer, 0, 4);
xTaskCreate(mouse_move_task, "mouse_move_task", 2 * 1024, NULL, configMAX_PRIORITIES - 3, &s_local_param.mouse_task_hdl);
return;
}
// move the mouse left and right
void mouse_move_task(void* pvParameters) {
const char* TAG = "mouse_move_task";
ESP_LOGI(TAG, "starting");
for(;;) {
s_local_param.x_dir = 1;
int8_t step = 10;
for (int i = 0; i < 2; i++) {
xSemaphoreTake(s_local_param.mouse_mutex, portMAX_DELAY);
s_local_param.x_dir *= -1;
// 这里主要是反向鼠标移动的方向,还有移动鼠标位置
xSemaphoreGive(s_local_param.mouse_mutex);
for (int j = 0; j < 100; j++) {
send_mouse(0, s_local_param.x_dir * step, 0, 0);
vTaskDelay(50 / portTICK_PERIOD_MS);
}
}
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
// send the buttons, change in x, and change in y
void send_mouse(uint8_t buttons, char dx, char dy, char wheel)
{
// 比较简单,就是填充report,然后调用发送
xSemaphoreTake(s_local_param.mouse_mutex, portMAX_DELAY);
if (s_local_param.protocol_mode == ESP_HIDD_REPORT_MODE) {
s_local_param.buffer[0] = buttons;
s_local_param.buffer[1] = dx;
s_local_param.buffer[2] = dy;
s_local_param.buffer[3] = wheel;
esp_bt_hid_device_send_report(ESP_HIDD_REPORT_TYPE_INTRDATA, 0x00, 4, s_local_param.buffer);
} else if (s_local_param.protocol_mode == ESP_HIDD_BOOT_MODE) {
s_local_param.buffer[0] = buttons;
s_local_param.buffer[1] = dx;
s_local_param.buffer[2] = dy;
esp_bt_hid_device_send_report(ESP_HIDD_REPORT_TYPE_INTRDATA, BOOT_PROTO_MOUSE_RPT_ID, 3, s_local_param.buffer);
}
xSemaphoreGive(s_local_param.mouse_mutex);
}
void bt_app_task_shut_down(void)
{
if (s_local_param.mouse_task_hdl) {
vTaskDelete(s_local_param.mouse_task_hdl);
s_local_param.mouse_task_hdl = NULL;
}
if (s_local_param.mouse_mutex) {
vSemaphoreDelete(s_local_param.mouse_mutex);
s_local_param.mouse_mutex = NULL;
}
return;
}
这里需要注意两个东西,send_mouse是发送了report,而回调中的ESP_HIDD_SEND_REPORT_EVT则是对应一个report发送完成的事件,如果收到了这个,说明这个report发送ok了。否则可能这个report就丢了或者怎样了。
case ESP_HIDD_SEND_REPORT_EVT:
// report发送完成回调标志
ESP_LOGI(TAG, "ESP_HIDD_SEND_REPORT_EVT id:0x%02x, type:%d", param->send_report.report_id,
param->send_report.report_type);
send_mouse
同时,也要注意,其实这个report无法连续发送多个,会出现直接崩溃的情况。正确应该是一个report发完,有了event回调以后,再发下一个。稍微注意一下官方demo中每个report其实等了50ms,实际上如果测试的话,会发现,大概在20ms以内,就能收到event了。
report还有一个特点,鼠标这里可能体现不出来,如果是类似手柄一类的东西,比如这次的report和上次是相同的,对于不同的host,可能处理方式不一样。有的host可能会持续执行之前操作,有的可能会直接不执行任何操作,比如一个button长按,发送一次report和连续发送3次report,没有区别,实际host表现出来的结果是相同的。而有的host则是,如果你发了一个report,没有后续,超过一定时间,则不会继续执行这个report的内容了。
前面还有一个地方,收到report以后,这里对应做了一个解析吧
bool check_report_id_type(uint8_t report_id, uint8_t report_type)
{
bool ret = false;
xSemaphoreTake(s_local_param.mouse_mutex, portMAX_DELAY);
do {
if (report_type != ESP_HIDD_REPORT_TYPE_INPUT) {
break;
}
if (s_local_param.protocol_mode == ESP_HIDD_BOOT_MODE) {
if (report_id == BOOT_PROTO_MOUSE_RPT_ID) {
ret = true;
break;
}
} else {
if (report_id == 0) {
ret = true;
break;
}
}
} while (0);
if (!ret) {
if (s_local_param.protocol_mode == ESP_HIDD_BOOT_MODE) {
esp_bt_hid_device_report_error(ESP_HID_PAR_HANDSHAKE_RSP_ERR_INVALID_REP_ID);
} else {
esp_bt_hid_device_report_error(ESP_HID_PAR_HANDSHAKE_RSP_ERR_INVALID_REP_ID);
}
}
xSemaphoreGive(s_local_param.mouse_mutex);
return ret;
}
到这里基本上整个HID 鼠标就看完了。
双核相关
esp32是双核的,所以创建任务的时候就会出现任务跑在哪个核心的问题。
简单说有两个核心,一个是PRO_CPU,一个是APP_CPU,底层是FreeRTOS,所以当挂起调度器的时候,只会挂起对应的那个核心调度,而不会影响到另一个核心。同时,双核是SystemTick也是独立的,中断也独立,互不影响。
如下就是普通的创建任务和将任务绑定到某个核心上的操作
xTaskCreate(startBlink, "blink_task", 1024, NULL, 1, &BlinkHandle);
xTaskCreatePinnedToCore(send_task, "send_task", 2048, NULL, 2, &SendingHandle, 0);
最后一个参数至关重要,决定这个任务创建在哪个核上.PRO_CPU 为 0, APP_CPU 为 1,或者 tskNO_AFFINITY 允许任务在两者上运行.
xTaskCreatePinnedToCore(Task1, "Task1", 10000, NULL, 1, NULL, 0);
xTaskCreatePinnedToCore(Task2, "Task2", 10000, NULL, 1, NULL, 1);
一般来说PRO_CPU,字面含义,WIIF和蓝牙的协议栈都是在这里跑的,可能用户代码进程被中断或者延迟,所以平常用户代码应该写在APP_CPU上,这样就和协议栈的繁忙工作流区分开了,进而可以充分利用资源。
HID Report Descriptor
HID的Report Descriptor要怎么写,也记录一下
首先Descriptor必须有Usage Page说明这个HID的大类,比如这里指代USB通用设备
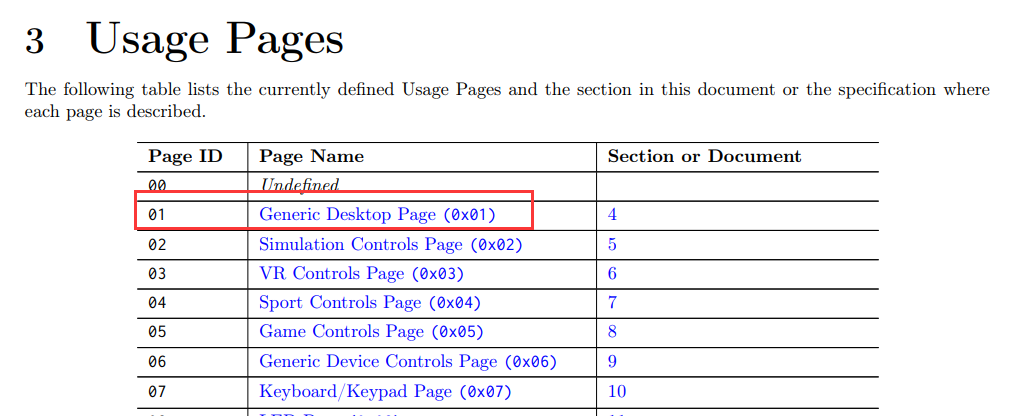
具体可以参考这里,usb规范
https://www.usb.org/sites/default/files/hut1_21_0.pdf#page=16
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x02, // USAGE (Mouse)
0xA1, 0x01, # Collection (Application)
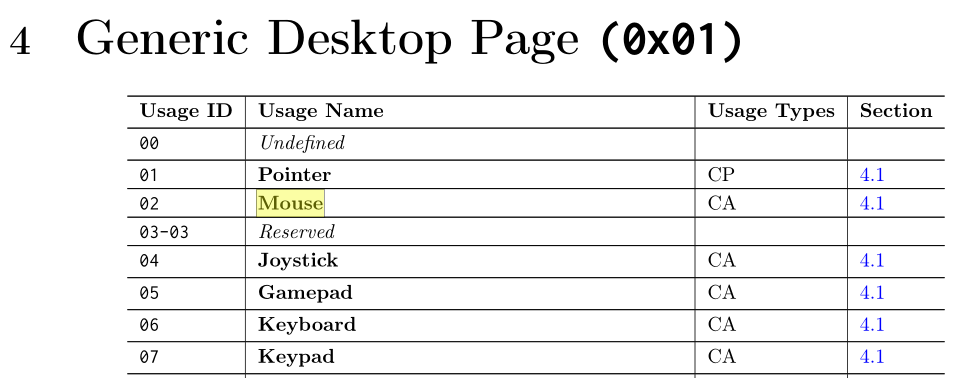
开头的USAGE相当于是USAGE_PAGE的详细描述,说明当前设备是鼠标
但是由于现代鼠标都不是只有一个功能,可能除了基础鼠标功能还有什么额外的功能,所以要分别描述每个部分。
Collection也分类型,一般是Application统领全局,然后再用Physical在其内部做进一步区分,同时每个Collection要有对应的开始和结束
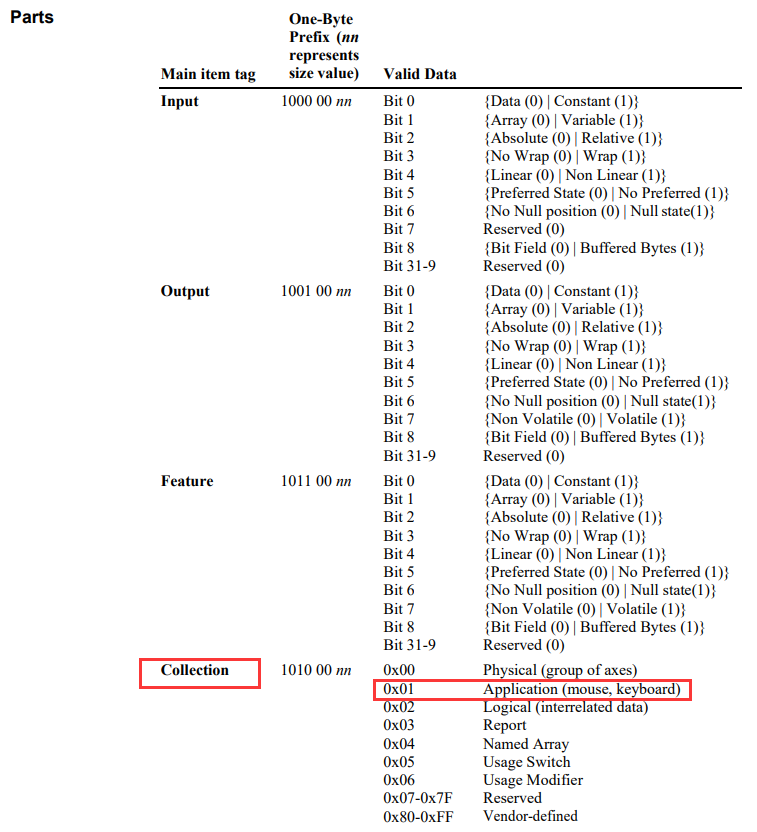
0xA1, 0x01, # Collection (Application)
0xXX, 0xXX, # USAGE
0xa1, 0x00, // COLLECTION (Physical)
...
0xC0, # End Collection (Physical)
...
0xC0, # End Collection (Application)
针对每个子Collection都需要有一个具体描述,所以还需要用一次USAGE
Collection可以嵌套,Physical Collection 则是指相当于是子Collection,他主要是说明在一个Applicaion中可能会有多个传感器或者多个数据集合,那么就需要再定义一层。
0xa1, 0x00, // COLLECTION (Physical)
0xC0, # End Collection
由于有多个Collection,不同的Collection的Report是不同的,所以就要单独设置每一个Report,并且用Report Id 区分。当然也可以只有一个Report,那么这种情况下必须要写Report Id,直接使用Collection 代替即可
# report map for keyboard
0x05, 0x01, # Usage Page (Generic Desktop)
0x09, 0x06, # Usage (Keyboard)
0xA1, 0x01, # Collection (Application)
0x85, 0x01, # Report ID (1)
...
0xC0, # End Collection
# report map for Cosumer Control (media keys)
0x05, 0x0C, # Usage Page (CONSUMER PAGE)
0x09, 0x01, # Usage (Consumer Control)
0xA1, 0x01, # Collection (Application)
0x85, 0x02, # here Report ID (2)
...
0xC0, # End Collection
这里就存在两个report,一个是01,一个是02,分别发送各自的内容,每一个Report都需要被Collection包起来。
再接着就是report的内容是如何定义的,Size定义了一个元数据的大小,而Count定义了这个元有几个。
这里则是表示有3个元数据,并且每个元数据的大小是1bit
0x95, 0x03, // REPORT_COUNT (3)
0x75, 0x01, // REPORT_SIZE (1)
除了说明Report的组成,还要说明这几个元数据是用来干嘛的,所以在开头的时候会加上说明,这里就说明是一个按键
0x05, 0x09, // USAGE_PAGE (Button)
同时还需要说明,这个元数据最小值和最大值都是多少,由于是Bit,这里表示这个值最小是0,最大是1。如果是字节那就需要自定义了
0x15, 0x00, // LOGICAL_MINIMUM (0)
0x25, 0x01, // LOGICAL_MAXIMUM (1)
除了说明了元数据的值,还需要说明你给的这个值对应到Host的时候,他们表示什么

根据键盘的Keyboard Page的定义,这里说明这三个元数据对应键盘的1-3,指代没啥用的按键
0x19, 0x01, // USAGE_MINIMUM (Button 1)
0x29, 0x03, // USAGE_MAXIMUM (Button 3)
上面还缺少一个描述,就是Logical元数据和Usage的按键,他们是怎么对应的,这个值是不是会变的,还是固定的,是一个bit来表示还是2个bit又或者是1个字节来表示的,这些都需要描述,Input就是描述这个东西的
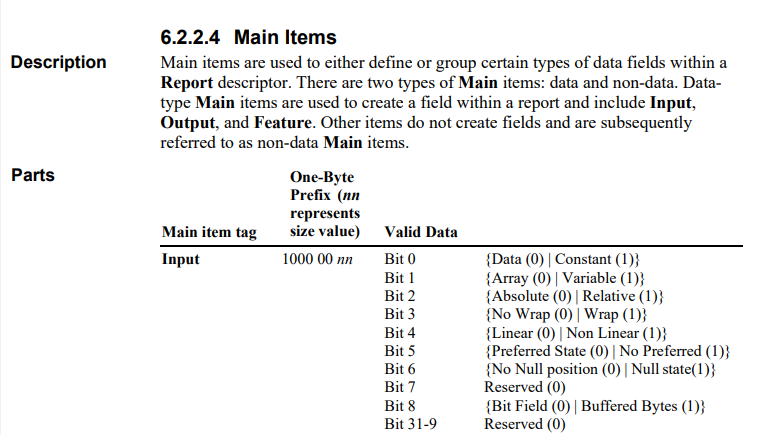
实际描述这个元数据只需要1个report size(1bit),所以是0x81
首先按键肯定是会变的,所以是Variable,其次这里的按键时绝对,而不是相对值,所以是Absolute,其他位用不到,所以都是0,那么其实就是0x02了
010
结合在一起,就是这样了
0x81, 0x02, // INPUT (Cnst,Var,Abs)
由于这个元数据是使用Bit来表示的,所以他们实际只用了3bit,但是最小长度是字节,则要用1字节大小存储。那么还有5个bit没有定义,如果没用到的话,也需要写上对应的说明,所以后续会有定义一个元数据,他的大小是5,数量是1,实际映射时,是使用1个report size(5bits),然后是Const类型的变量,不会变的
0x95, 0x01, // REPORT_COUNT (1)
0x75, 0x05, // REPORT_SIZE (5)
0x81, 0x03, // INPUT (Cnst,Var,Abs)
这样就把一个report完整定义好了。
继续定义鼠标的X、Y和滚轮值
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x30, // USAGE (X)
0x09, 0x31, // USAGE (Y)
0x09, 0x38, // USAGE (Wheel)
0x15, 0x81, // LOGICAL_MINIMUM (-127)
0x25, 0x7f, // LOGICAL_MAXIMUM (127)
0x75, 0x08, // REPORT_SIZE (8)
0x95, 0x03, // REPORT_COUNT (3)
0x81, 0x06, // INPUT (Data,Var,Rel)
按照上面的说明,X、Y、Wheel最大时127最小时-127,同时一个数据使用8bit,一共3个数据,并且这个数据是可变的、相对值,而不是绝对值。
将上面的结合在一起,就得到了最终的mouse descriptor
// a generic mouse descriptor
uint8_t hid_descriptor_mouse_boot_mode[] = {
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x02, // USAGE (Mouse)
0xa1, 0x01, // COLLECTION (Application)
0x09, 0x01, // USAGE (Pointer)
0xa1, 0x00, // COLLECTION (Physical)
0x05, 0x09, // USAGE_PAGE (Button)
0x19, 0x01, // USAGE_MINIMUM (Button 1)
0x29, 0x03, // USAGE_MAXIMUM (Button 3)
0x15, 0x00, // LOGICAL_MINIMUM (0)
0x25, 0x01, // LOGICAL_MAXIMUM (1)
0x95, 0x03, // REPORT_COUNT (3)
0x75, 0x01, // REPORT_SIZE (1)
0x81, 0x02, // INPUT (Data,Var,Abs)
0x95, 0x01, // REPORT_COUNT (1)
0x75, 0x05, // REPORT_SIZE (5)
0x81, 0x03, // INPUT (Cnst,Var,Abs)
0x05, 0x01, // USAGE_PAGE (Generic Desktop)
0x09, 0x30, // USAGE (X)
0x09, 0x31, // USAGE (Y)
0x09, 0x38, // USAGE (Wheel)
0x15, 0x81, // LOGICAL_MINIMUM (-127)
0x25, 0x7f, // LOGICAL_MAXIMUM (127)
0x75, 0x08, // REPORT_SIZE (8)
0x95, 0x03, // REPORT_COUNT (3)
0x81, 0x06, // INPUT (Data,Var,Rel)
0xc0, // END_COLLECTION
0xc0 // END_COLLECTION
};
测试
看完以后,编译烧写测试了一下,基本ok
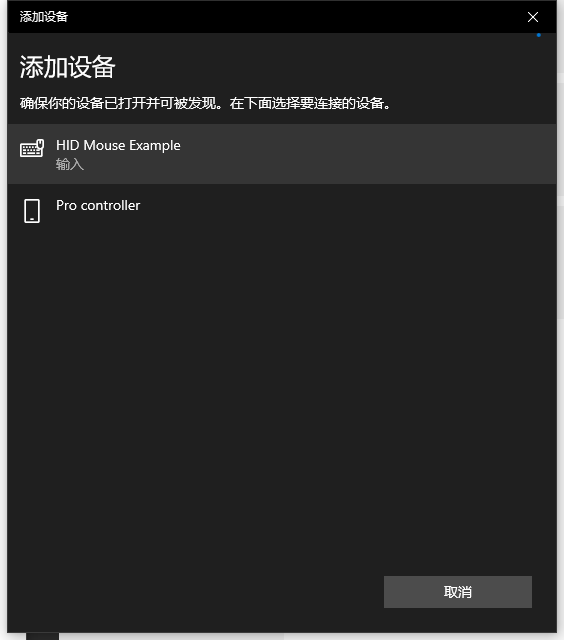
连接以后,鼠标开始左右平移
Summary
剩下就可以开始基于这个做修改,直接修改为Joycon了
Quote
https://github.com/darthcloud/BlueRetro
https://blog.csdn.net/lum250/article/details/123012522
https://docs.espressif.com/projects/esp-idf/zh_CN/release-v4.0/api-reference/bluetooth/esp_gap_bt.html
https://blog.csdn.net/XiaoXiaoPengBo/article/details/108366776
https://blog.csdn.net/ailta/article/details/106465015
https://hackmd.io/@meebox/By9V9AJPd
https://www.cnblogs.com/AlwaysOnLines/p/4552840.html