Foreword
最早的ESP32模拟Pro Controller,那会问题很多,甚至esp-idf都没有官方支持,靠着路人魔改的库,才勉强实现
https://github.com/NathanReeves/BlueCubeMod
当时性能实在太差,不稳定,所以弃坑了。
过了2年,esp-idf的classic bluetooth总算相对稳定一些了,也有一些demo可以参考,所以拾起来,继续试试看。
这一试,发现效果还不错,快要接近有线的水平了,于是开始填坑。
基本操控
基本操作在BlueCubeMod的仓库中就已经实现了,基本没啥问题。
基本协议都在参考的仓库中,这里主要记录一些在参考仓库中没有说明或者很难找的一些问题
手柄的配对流程很少有人做总结,所以我自己总结一下,这样做之前就有个大概的影响,有点方向感
Pro 配对流程
- 获取设备信息
- 退出低功耗模式
- 读取工厂配置信息(SN码)
- 读取颜色信息
- 设置报文模式
- 设置手柄配对按键时间
- 读取IMU的参数信息
- 读取摇杆的参数信息
- 读取摇杆的用户校准信息
- 读取摇杆的出厂校准信息
- 读取IMU的校准信息
- 设置IMU工作
- 设置MCU启动
- 设置震动工作
- 设置手柄区分小灯亮起
JoyCon配对流程,额外增加两步
16.设置MCU模式
17.再次设置MCU挂起
手柄一定是整个流程走完了,自动会变成等待用户按键以后结束配对,否则会卡在中间重复发没有确认的命令。JoyCon的配对完成以后,发送按键可能并不能激活,这是因为需要一对JC才能完全显示手柄,单JC,切换成横着使用的模式(SR+SL)才能显示,否则就只能Home键,切回桌面或者是触屏退出配对,然后就能看到实际上JC已经在左下角显示出来了,功能也是正常的。
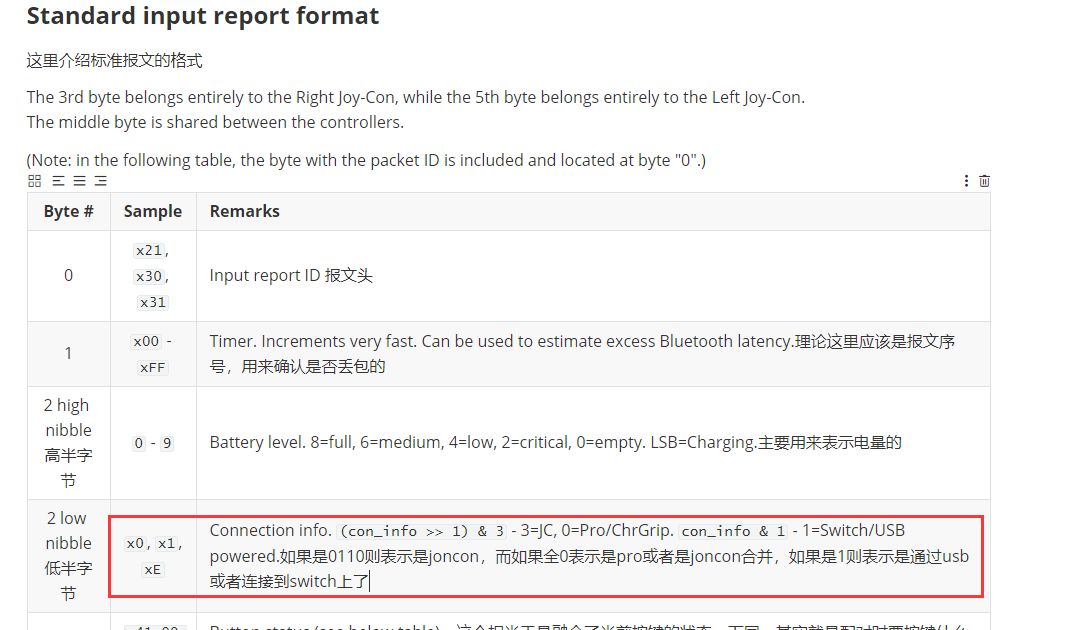
报文序号
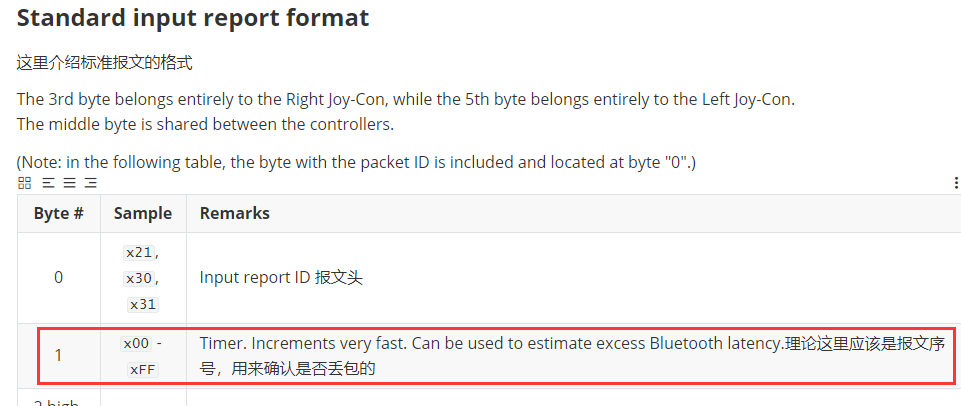
需要注意报文序号需要实现,否则会出现发送HID报文,但是NS完全不识别的情况(只响应了第一次的报文)
反倒是配对和Amiibo的命令报文,如果你没有序号,也能正常工作
报文频率
一般的情况下,默认配置都是60Hz的频率,无论是JC还是Pro。但是据说Pro可以切换到120Hz,那就是8ms一个报文,和USB基本是一个水平的。
但是ESP32这里做不到这么快,60Hz也稍微有点勉强,大概是50Hz左右,20ms一个报文。不过这已经比之前200ms一个按键强多了。
而且报文丢的情况还是非常少见的,也就是基本每个报文都是稳定的,NS都会有响应。
HID Descriptor
以前用USB的时候非常纠结报文的内容,和USB相关的一大堆设置。到了蓝牙这里反而不用纠结了,基本上只要是个Descriptor就能正常识别,不用区分Pro或者JC,单JC也可以用Pro的报文。
摇杆校准
需要注意的是摇杆的校准会影响摇杆的归中值,如果消息回复的不正确的话,可能会导致一直触发摇杆的情况。
// 0x10 0x603D
void reply_FactorStickCalAddr()
{
standard_report reply = {0};
reply.id = StandInput;
reply.timer = 0;
reply.bat_con = cur_con.bat | cur_con.con_info;
reply.button[0] = 0;
reply.button[1] = 0;
reply.button[2] = 0;
reply.l_stick[0] = 0x00;
reply.l_stick[1] = 0x08;
reply.l_stick[2] = 0x80;
reply.r_stick[0] = 0;
reply.r_stick[1] = 0x08;
reply.r_stick[2] = 0x80;
reply.vibrator = 0x80;
reply.sub.ack = FLASHACK;
reply.sub.sub_id = SerialFlashRead;
reply.sub.read_flash.addr = FactorStickCalAddr;
reply.sub.read_flash.len = 0x19;
// min 0x100 mid 0x800 max 0xF00
reply.sub.read_flash.reserve[0] = 0x00;
reply.sub.read_flash.reserve[1] = 0x07; // lh max 0x700
reply.sub.read_flash.reserve[2] = 0x70; // lv max 0x700
reply.sub.read_flash.reserve[3] = 0x00;
reply.sub.read_flash.reserve[4] = 0x08; // lh mid 0x800
reply.sub.read_flash.reserve[5] = 0x80; // lv mid 0x800
reply.sub.read_flash.reserve[6] = 0x00;
reply.sub.read_flash.reserve[7] = 0x07; // lh min 0x700
reply.sub.read_flash.reserve[8] = 0x70; // lv min 0x700
reply.sub.read_flash.reserve[9] = 0x00; // lh mid 0x800
reply.sub.read_flash.reserve[10] = 0x08; // lv mid 0x800
reply.sub.read_flash.reserve[11] = 0x80;
reply.sub.read_flash.reserve[12] = 0x00;
reply.sub.read_flash.reserve[13] = 0x07;
reply.sub.read_flash.reserve[14] = 0x70;
reply.sub.read_flash.reserve[15] = 0x00;
reply.sub.read_flash.reserve[16] = 0x07;
reply.sub.read_flash.reserve[17] = 0x70;
reply.sub.read_flash.reserve[18] = 0xFF;
reply.sub.read_flash.reserve[19] = 0xFF;
reply.sub.read_flash.reserve[20] = 0xFF;
reply.sub.read_flash.reserve[21] = 0xFF;
reply.sub.read_flash.reserve[22] = 0xFF;
reply.sub.read_flash.reserve[23] = 0xFF;
reply.sub.read_flash.reserve[24] = 0xFF;
// ESP_LOG_BUFFER_HEX("reply_FactorStickCalAddr",&reply,STDREPORT_HEAD_SIZE + SUBCOMMAND_10_HEAD + reply.sub.read_flash.len);
esp_bt_hid_device_send_report(ESP_HIDD_REPORT_TYPE_INTRDATA, 0xa1, STDREPORT_HEAD_SIZE + SUBCOMMAND_10_HEAD + reply.sub.read_flash.len, (uint8_t *)&reply);
}
手柄颜色
Pro手柄颜色分为四个,机身、按钮、左手柄、右手柄,而JC的手柄只有机身和按钮颜色。
需要注意一点,实际Pro想要自定义颜色,必须在回复设备信息的时候,回复颜色的使用的情况
// 0 no use flash color
// 1 use body and button color
// 2 use custom color
#define SUB0x02_USE_COLOR 0x02
如果回复了0,任何颜色都不生效,1的话Pro手柄的手柄颜色无法生效,只有回复2的时候才是完全自定义颜色
// 0x02
void reply_GetDeviceInfo()
{
standard_report reply;
reply.id = StandInput;
reply.timer = 0;
reply.bat_con = cur_con.bat | cur_con.con_info;
reply.button[0] = 0;
reply.button[1] = 0;
reply.button[2] = 0;
reply.l_stick[0] = 0x00;
reply.l_stick[1] = 0x08;
reply.l_stick[2] = 0x80;
reply.r_stick[0] = 0;
reply.r_stick[1] = 0x08;
reply.r_stick[2] = 0x80;
reply.vibrator = 0x80;
reply.sub.ack = ACK | 0x02;
reply.sub.sub_id = GetDeviceInfo;
reply.sub.device_info.firmware_version = FIRMWARE_VERSION;
reply.sub.device_info.firmware_revision = FIRMWARE_REVISION;
reply.sub.device_info.device_type = cur_con.type;
reply.sub.device_info.reserve0 = SUB0x02_REVERS0;
memcpy(reply.sub.device_info.MAC, cur_con.MAC, MAC_LEN);
reply.sub.device_info.reserve1 = SUB0x02_REVERS1;
reply.sub.device_info.use_color = SUB0x02_USE_COLOR;
esp_bt_hid_device_send_report(ESP_HIDD_REPORT_TYPE_INTRDATA, 0xa1, STDREPORT_HEAD_SIZE + SUBCOMMAND_SIZE0, (uint8_t *)&reply);
}
Pro手柄有特殊的前导值,如果是特定版本的手柄,只要前面的值符合,那么后面的自定义颜色是不会生效的
uint32_t pro_color[][3] = {
// body |button |leftGrip |rightGrip
{0x323232AA, 0xAAAA8282, 0x82828282}, // normal black
{0x313232FF, 0xFFFFFFFF, 0xFFFFFFFF}, // Splatoon 2
{0x323132FF, 0xFFFFFFFF, 0xFFFFFFFF}, // Xenoblade 2
{0x323231FF, 0xFFFFFFFF, 0xFFFFFFFF}, // Super Smash Bros
{0x323233FF, 0xFFFF4655, 0xF5E6FF00}, // Splatoon 3 fake
{0xE6E6E632, 0x323200DD, 0xDDDD00DD} // test
/*
pro手柄缺少配色:
喷射3
怪猎
怪猎曙光
*/
};
实际上如果使用了joy_toolkit,就会看到一堆issue中提到他们不能自定义pro颜色,或者是颜色不生效。
实际上pro自定义颜色是需要修改pro中601B地址的值,将其改成02才能自定义,其实这个02就是我们这里命令回复的02。
https://github.com/CTCaer/jc_toolkit/issues/28
这个值文档并没有说明,然后反复检查NS并没有请求601B的地址的值,查了好久都查不到,最后联想到这里有可能,就试了一下,发现果然如此
手柄区分
手柄能不能连上是由手柄的蓝牙名称决定的,每个名称都是固定的,只要叫这个,NS就会主动连接
if (cur_con.type == Joy_Con_L)
esp_bt_dev_set_device_name("Joy-Con (L)");
if (cur_con.type == Joy_Con_R)
esp_bt_dev_set_device_name("Joy-Con (R)");
if (cur_con.type == Pro)
esp_bt_dev_set_device_name("Pro Controller");
具体NS是识别成Pro还是JC还是通过上面的02 设备信息来区分的,你可以叫Pro,但却是一个JC
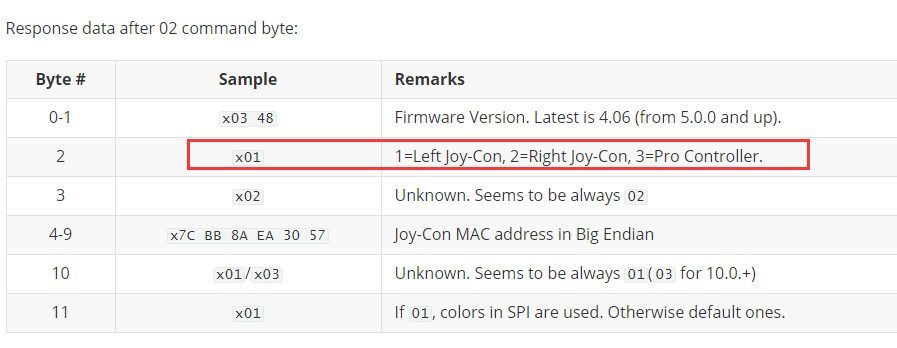
虽然在标准报文中也存在当前的设备信息,但是经过测试,标准报文中的手柄信息并不会生效,不具有识别性。
重连接或者自动连接
由于参考仓库里存在蓝牙的配对,存储密钥相关内容,导致我一直以为这个配对要手动完成。
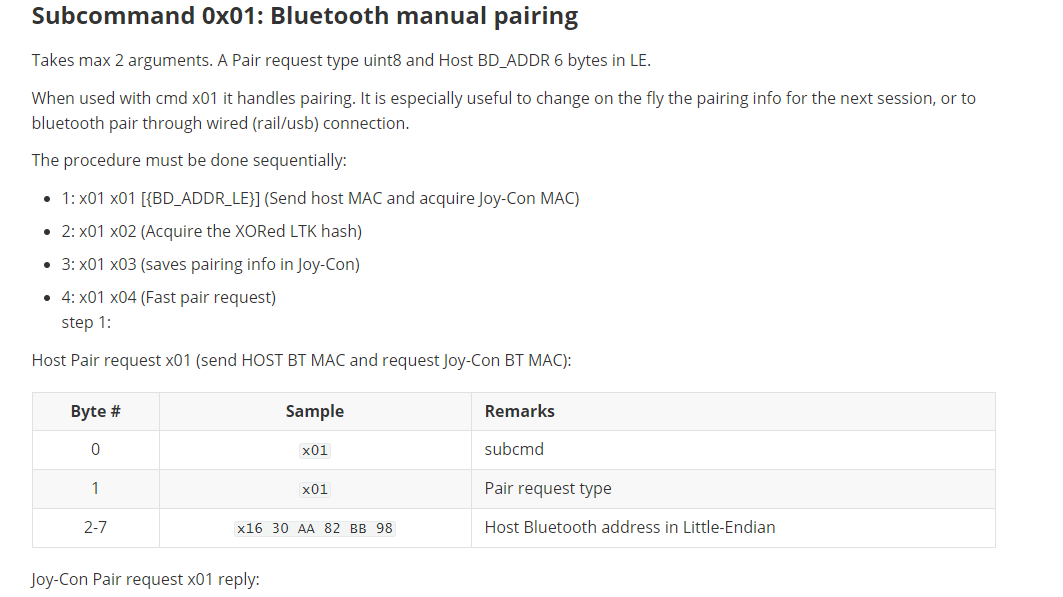
实际上这个流程完全可以忽略,ESP32或者是其他的现成的蓝牙模块,基本上都会自动完成这个配对存储的过程。其中关键的LTK也会自动生成并存储,所以完全不用开发者担心(当然一些非常原始的蓝牙栈或者是没实现这个部分的,可能需要手动完成)
而要触发重连接也非常简单,只要连接指定MAC地址,即可自动完成重新连接(甚至可以直接唤醒NS)
if (cur_con.auto_pair)
{
ESP_LOGI(TAG, "reconnect");
// Connect to paired host device if we haven't connected already
if (esp_bt_hid_device_connect(cur_con.NS_MAC) != ESP_OK)
{
ESP_LOGI(TAG, "Failed to connect to paired switch. Setting scannable and discoverable.");
esp_bt_gap_set_scan_mode(ESP_BT_CONNECTABLE, ESP_BT_GENERAL_DISCOVERABLE);
cur_con.paired = false;
notify = NOPAIRING;
}
}
配对长按时间
这里的准确理解应该是在弹出配对界面时,你需要长按下面的按钮多久,对应NS那边才会显示你的手柄
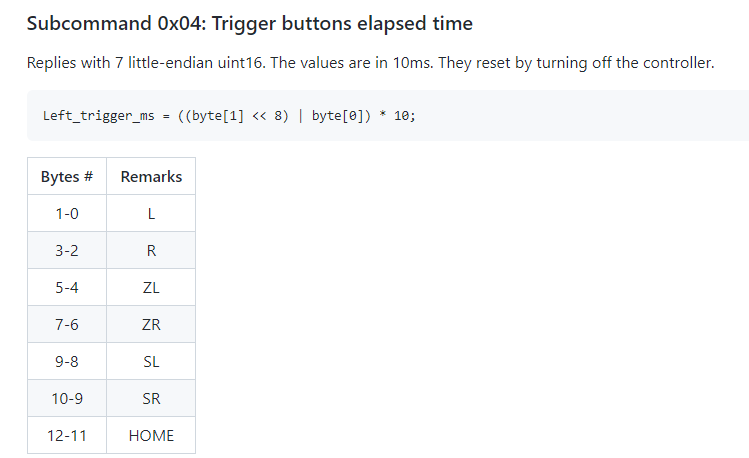
而实际上全设置成0了,也就是随便按一下手柄,就会触发显示配对,再A一下,就成功配对了。
标准报文的按键
刚开始回复命令时,标准报文中的button并不会赋值,后来发现这个东西会造成各自离谱bug,特别是在后续的Amiibo的流程中会影响一些操作。所以最好是设置成默认没有按,并且摇杆等都归中的状态。
// 0x22
void reply_McuResume(uint8_t param)
{
standard_report reply = {0};
reply.id = StandInput;
reply.timer = 0;
reply.bat_con = cur_con.bat | cur_con.con_info;
reply.button[0] = 0;
reply.button[1] = 0;
reply.button[2] = 0;
reply.l_stick[0] = 0x00;
reply.l_stick[1] = 0x08;
reply.l_stick[2] = 0x80;
reply.r_stick[0] = 0;
reply.r_stick[1] = 0x08;
reply.r_stick[2] = 0x80;
reply.vibrator = 0x80;
Amiibo
到Amiibo这里就更复杂了,可以参考的信息就更少了。简单说Pro和JC上用的都是ST量产的一块读写NFC的芯片,同时还有一个主控STM32F4用来沟通NFC、IR、IMU还有博通的蓝牙。
平常想要读取或者设置NFC、IR和IMU都需要通过操控主控来完成,这就导致了实际蓝牙通信的时候有一部分信息是用来间接操控NFC等东西的。但是这部分的逆向信息又不够多,所以模拟Amiibo的例子也只有几个。
主要是借助Poohl的仓库来理解Amiibo读取和写入流程的
https://github.com/Poohl/joycontrol
由于一开始根本没太看懂他写的到底是啥,加上他注释里疯狂吐槽这个协议,弄得我一头雾水。
于是又看了jc_toolkit,直接从NS的角度来看他们到底是怎么沟通的,看完以后发现流程还是比较顺的
https://github.com/CTCaer/jc_toolkit
我简单总结了一下
NS视角看读取Amiibo流程
前置准备环节,手柄报文切换到NFC报文
- 手柄的NFC相关的MCU进入运行状态
- 查询MCU是否正常启动了
- 设置NFC启动工作
- 查询NFC是否启动
- 请求NFC mode status,这里准确的说应该是让NFC切换到等待接收tag的状态
- 读取amiibo的uid
- 读取amiibo的具体内容
- 其实已经读完了,回到5或者是直接退出了
结束,手柄报文切换到标准报文
这么看就非常简单,前面的1,3,都有专门的回复,相当于是在握手,但是到4以后,所有的回复都是通过同一个命令回复的(实际上是NS一直重复发状态询问的命令),所以4以后的状态都需要自己存储一下,并根据情况回复。
有了上面的NS会干啥的基础以后,再看joycontrol,就能理解他在干啥了。
MCU运行和NFC配置
一般来说是要先设置MCU运行,然后再设置NFC配置的,但是实际上你回复的时候,可以直接回复NFC,就能进入下一步了。这样就少了一步。
Poll两次
需要注意一下,当启动NFC开始读取以后,还会需要你二次启动,也就是Poll这个状态会出现Poll_Again,而这个二次完全只用自己直接切换就行了。
所以可以直接优化掉Poll,直接回复Poll_Again 就能进入下一步,而不需要进行状态切换。
退出
退出流程,其实都没有人给出来,所以目前的退出是借助上面的Poll_Again,回复一个无效Amiibo来退出的。或者通过Home按键,强行退出,不过这种会导致状态没有正确切出来。
经过测试发现,实际上直接回复00的Amiibo uid即可自动退出了,不用清空整个Amiibo。
写入命令

由jc_toolkit这里可以知道,其实joycontrol中的写入结束,其实是刚好param[2]==0x08了
| 参数index | 含义 |
|---|---|
| 0 | seq,命令序列 |
| 1 | 好像没啥用? |
| 2 | 0表示命令未结束,8表示连续的命令结束 |
| 3 | 后续的payload长度 |
简化流程
通过我上面的精简和总结,流程就变成下面的
读取退出流程
1.NS请求切换报文为NFC
2.Pro回复切换报文
3.NS请求切换MCU状态为启动
4.Pro回复启动
5.NS请求切换NFC状态为启动
6.Pro回复启动
7.NS请求NFC启动状态
8.Pro回复NFC 配置ok
9.NS请求开始读取uid
10.Pro回复Poll_Again 并且带上uid
11.NS请求读取整个amiibo
12.Pro回复3个包,每个包分别包含了一部分信息
13.NS请求停止读取
14.Pro回复停止读取,并且清空uid
15.NS请求切换MCU状态为启动
16.Pro回复启动
17.NS请求切换报文为标准
18.Pro回复切换报文
读取写入流程
1.NS请求切换报文为NFC
2.Pro回复切换报文
3.NS请求切换MCU状态为启动
4.Pro回复启动
5.NS请求切换NFC状态为启动
6.Pro回复启动
7.NS请求NFC启动状态
8.Pro回复NFC 配置ok
9.NS请求开始读取uid
10.Pro回复Poll_Again 并且带上uid
11.NS请求读取整个amiibo
12.Pro回复3个包,每个包分别包含了一部分信息
13.NS请求准备写入
14.Pro回复准备写入
15.NS请求写入,一共会写15次,如果出现漏包,会自动重传
16.Pro每次回复对应写入的seq
17.NS请求写入结束
18.Pro回复写入结束
19.NS请求停止读取
20.Pro回复停止读取,并且清空uid
21.NS请求开始读取uid
22.Pro回复启动,空uid
23.NS请求停止读取
24.Pro回复停止读取,并且清空uid
25.NS请求切换MCU状态为启动
26.Pro回复启动
27.NS请求切换报文为标准
28.Pro回复切换报文
(以上过程中,NS的查询状态发了非常多遍,由于他们主要是读取状态,所以没有记录)
joycontrol的流程中状态切换都靠每个响应的命令,而状态恢复统一靠NS查询状态的命令去回复,相当于是有点异步的意思,这就导致看代码麻烦,写代码也麻烦,debug就更难受了。
所以我重写以后,每个命令响应后,立马就会回复它对应的回复,而不是依赖NS查询状态,NS的查询状态变成了,类似我漏发了,帮我补发的操作,相当于是冗余。
遗留问题
- Amiibo退出不够优雅
- ESP32的蓝牙栈只能模拟一个APP,而不能同时模拟2个,JonCon的左右手柄只能存在一个
- Amiibo目前是存储在内存的,理论上可以直接根据key和uid生成对应的Amiibo,而不需要全量存储。
Summary
刚开始没有任何数据的情况下,直接调试,非常困难,Amiibo卡了三天没啥进展,多亏群里的白影协助帮我dump了一份完整数据,对照着修bug,总算把流程梳理顺当了,非常感谢。
至此就可以使用十几块钱的板子模拟出三四百块的Pro的效果了,虽然性能还是差一点,不过配合EasyCon使用已经非常ok了。
Quote
以下仓库非常值得参考,每个流程都借助他们的说明,否则无法实现,非常感谢
https://github.com/Poohl/joycontrol
https://github.com/mart1nro/joycontrol
https://github.com/NathanReeves/BlueCubeMod
https://github.com/dekuNukem/Nintendo_Switch_Reverse_Engineering
https://github.com/CTCaer/Nintendo_Switch_Reverse_Engineering/tree/master
https://github.com/mumumusuc/Nintendo_Switch_Reverse_Engineering
https://github.com/elmagnificogi/Nintendo_Switch_Reverse_Engineering/commits/master
https://github.com/mumumusuc/libjoycon
https://github.com/CTCaer/jc_toolkit
https://github.com/Brikwerk/nxbt
https://switchbrew.org/wiki/Joy-Con
https://wiki.gbatemp.net/wiki/Amiibo
https://github.com/HandHeldLegend/RetroBlue-ESP32