Foreword
以下是使用VisualGDB在VS中建立一个STM32的工程
VisualGDB
https://visualgdb.com/
Go cross-platform with comfort
VisualGDB makes cross-platform development with Visual Studio easy and comfortable. It supports:
- Barebone embedded systems and IoT modules (see full list)
- C/C++ Linux Applications
- Native Android Apps and Libraries
- Raspberry Pi and other Linux boards
- Linux kernel modules (separate VisualKernel product)
- ESP32 and Arduino targets
VS2008-2022 including the free Community Edition are supported.
简单说就是一个高度集成的插件,用来支持windows到linux等嵌入式开发的工具
安装
https://visualgdb.com/download/
直接下载安装,有30天的免费试用
使用
由于是VS2022,所有有些教程中的选项现在反而找不到了。
创建新项目,使用gdb过滤,没有单独的VisualGDB的选项卡
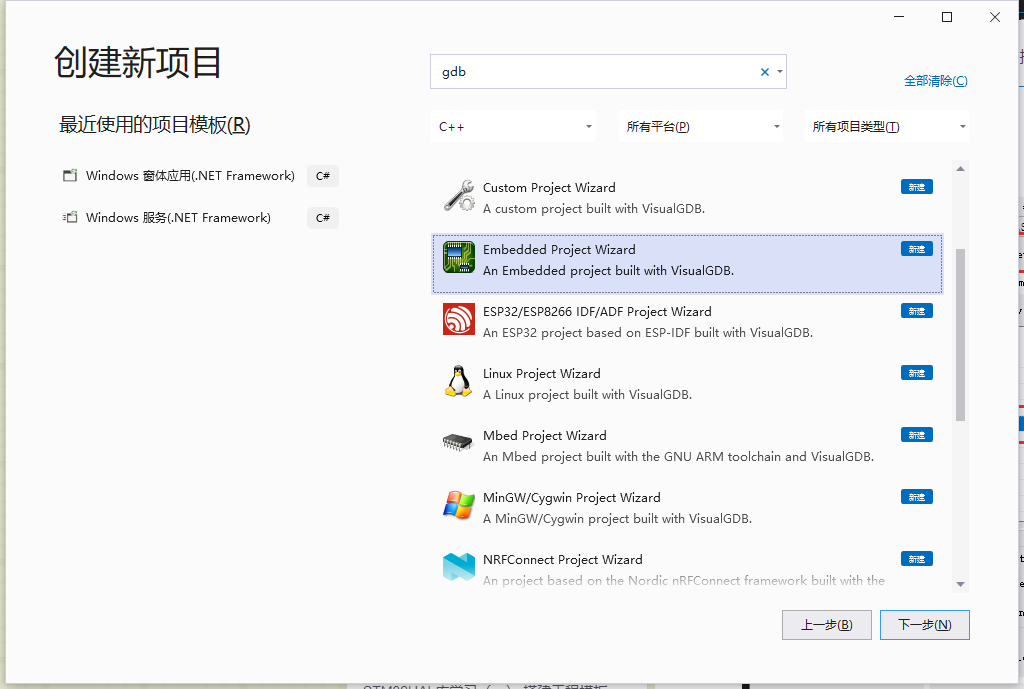
这里选择Embedded Project Wizard
第一次新建会出现,激活30天试用
然后是一些工程配置,默认即可
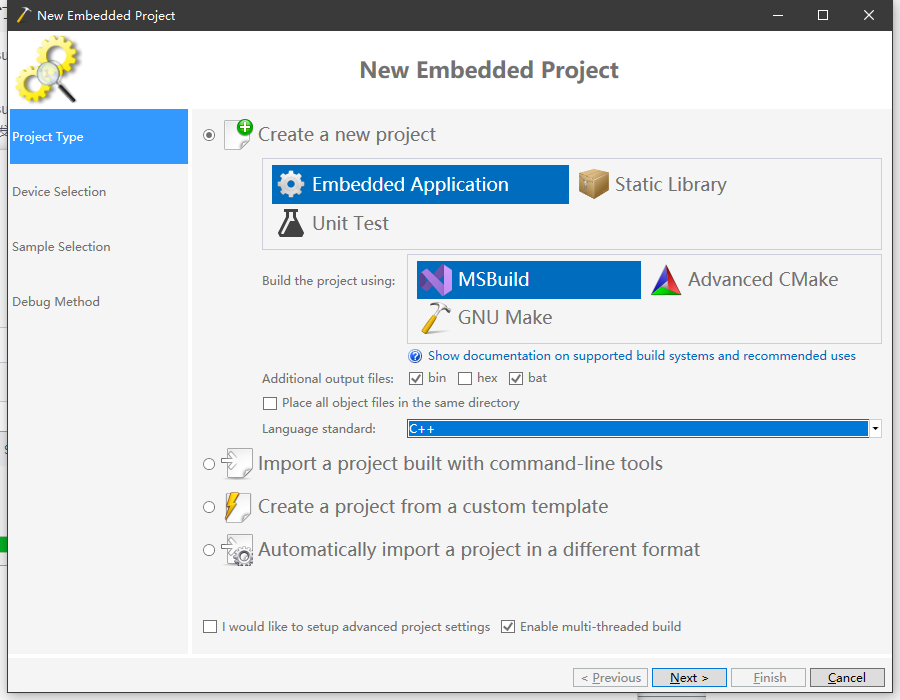
工程类型,编译选择MSBuild
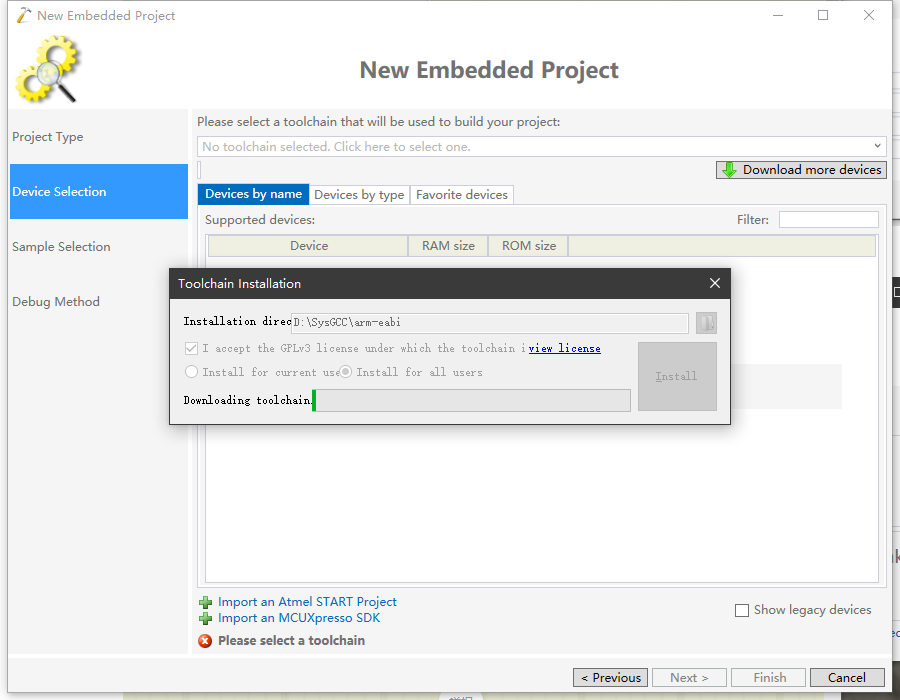
选择ARM工具链,第一次需要安装arm-eabi,这个也有点慢(大概要一两个小时才能下完),最好挂代理
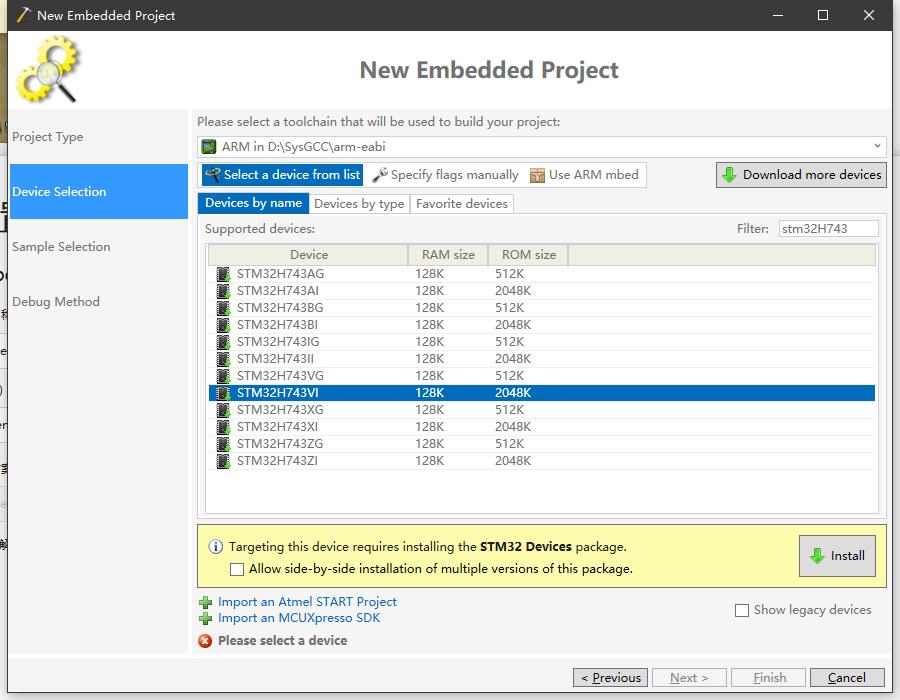
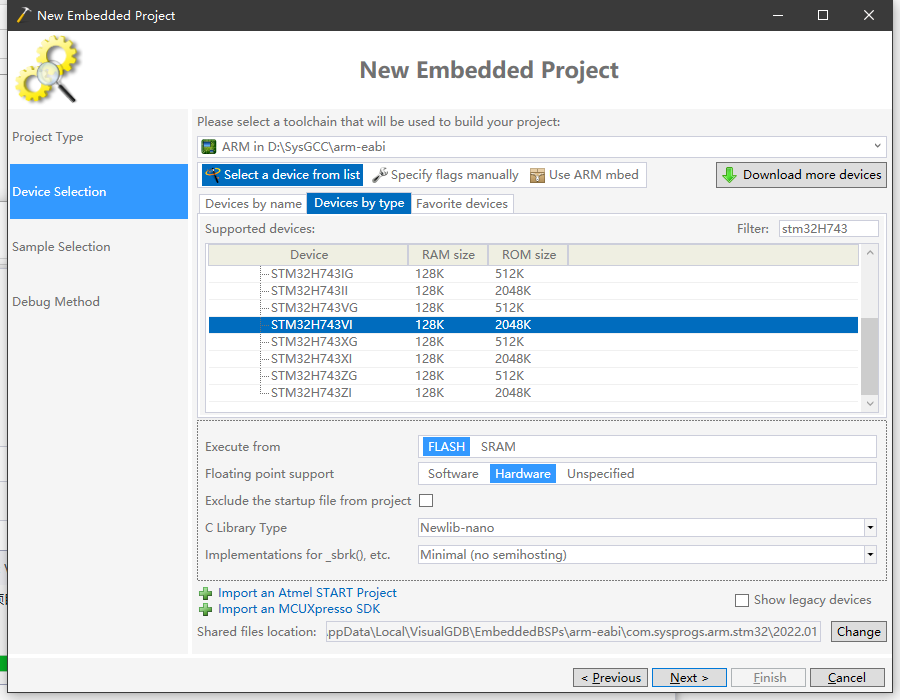
选择芯片,然后安装STM32 Devices,一样可能比较慢
安装完以后
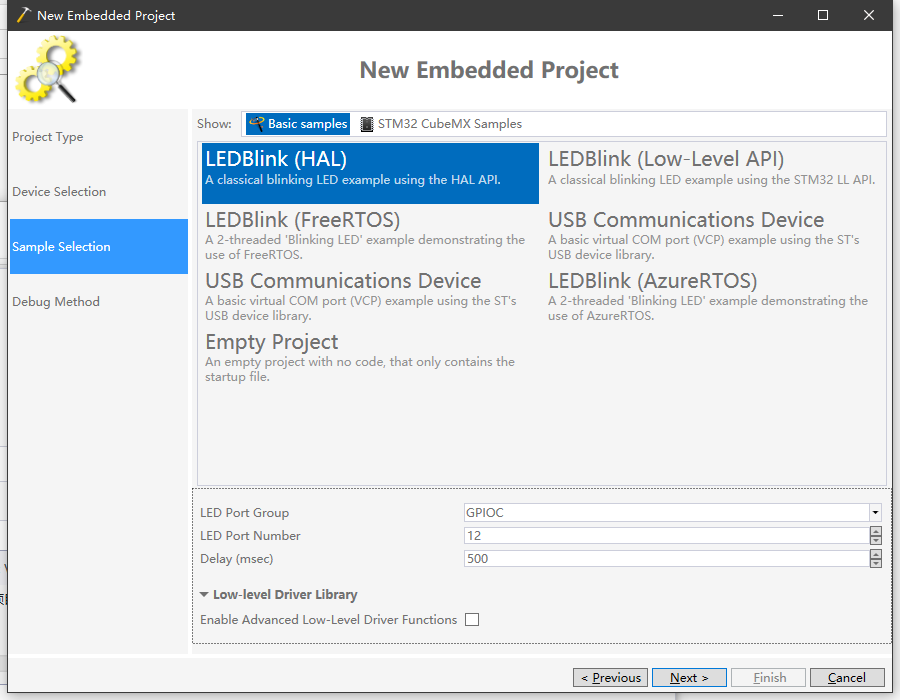
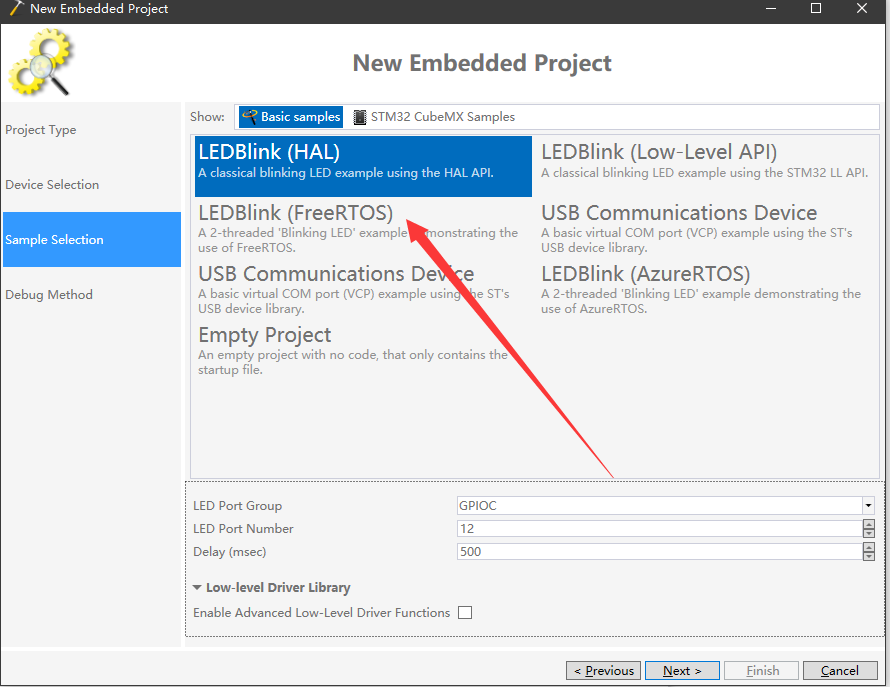
选择一个demo工程,亮个灯
选择调试方式,这里选J-Link,然后自动安装
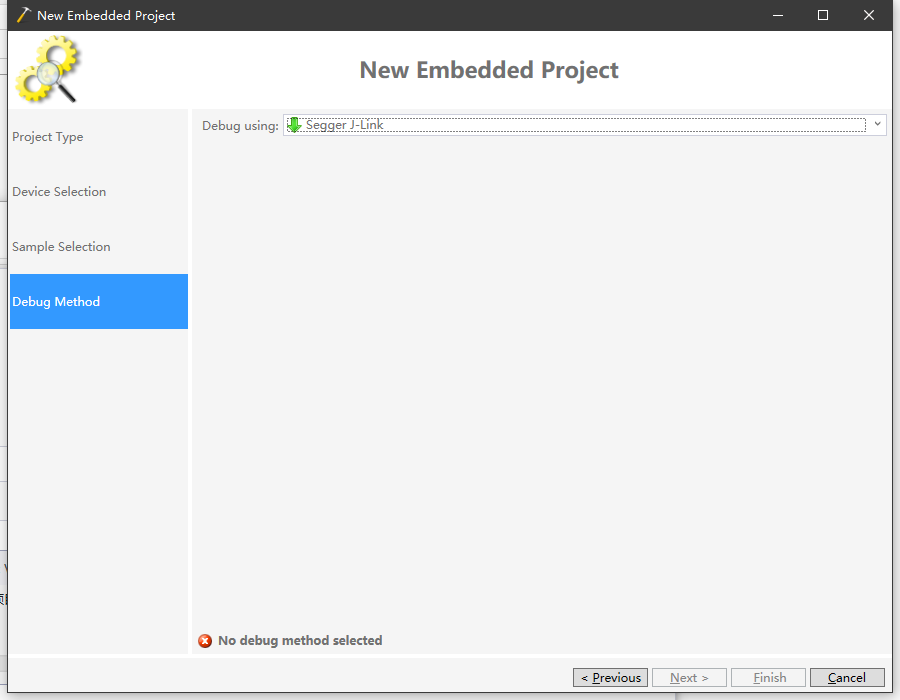
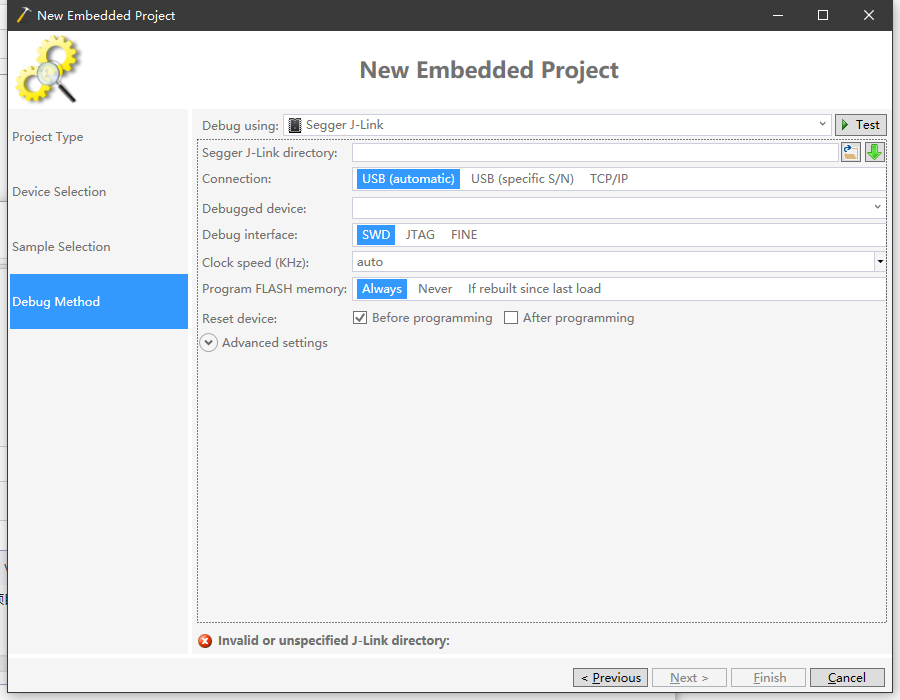
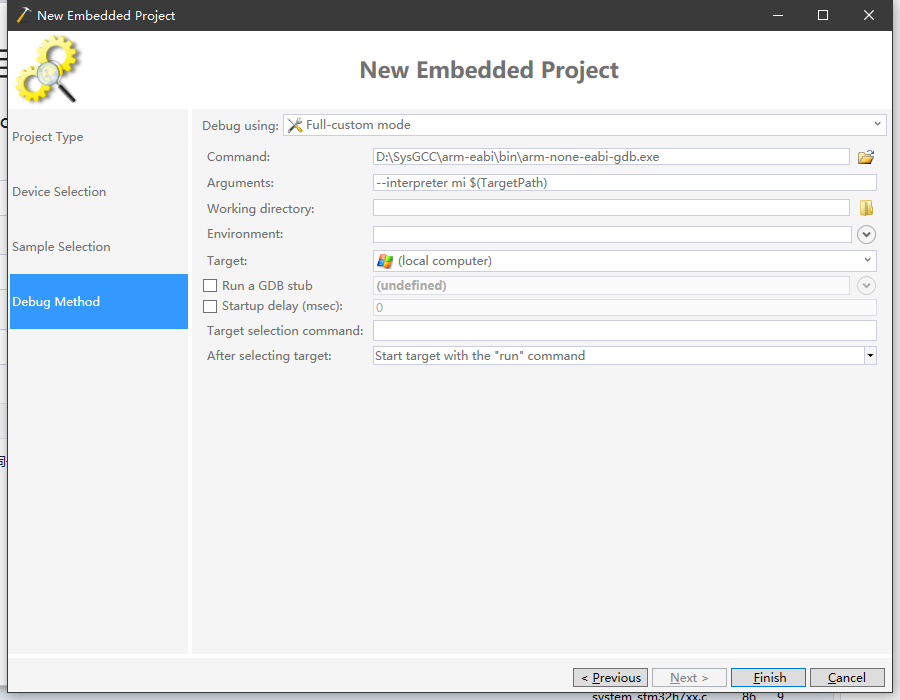
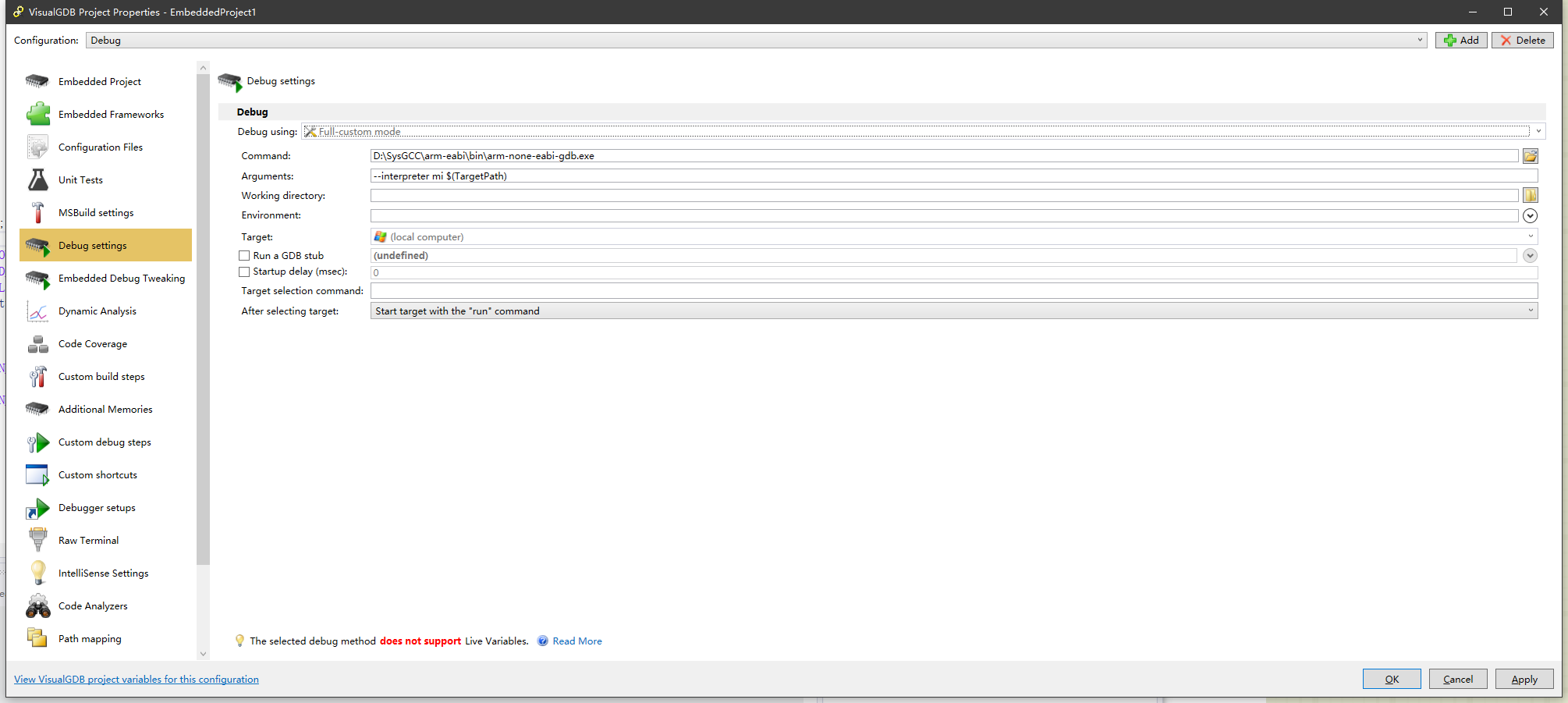
要选择J-Link目录,由于我这里实际没有,所以跳过了,切换到Full-custom mode 暂时跳过这个
生成的工程如下,编译正常
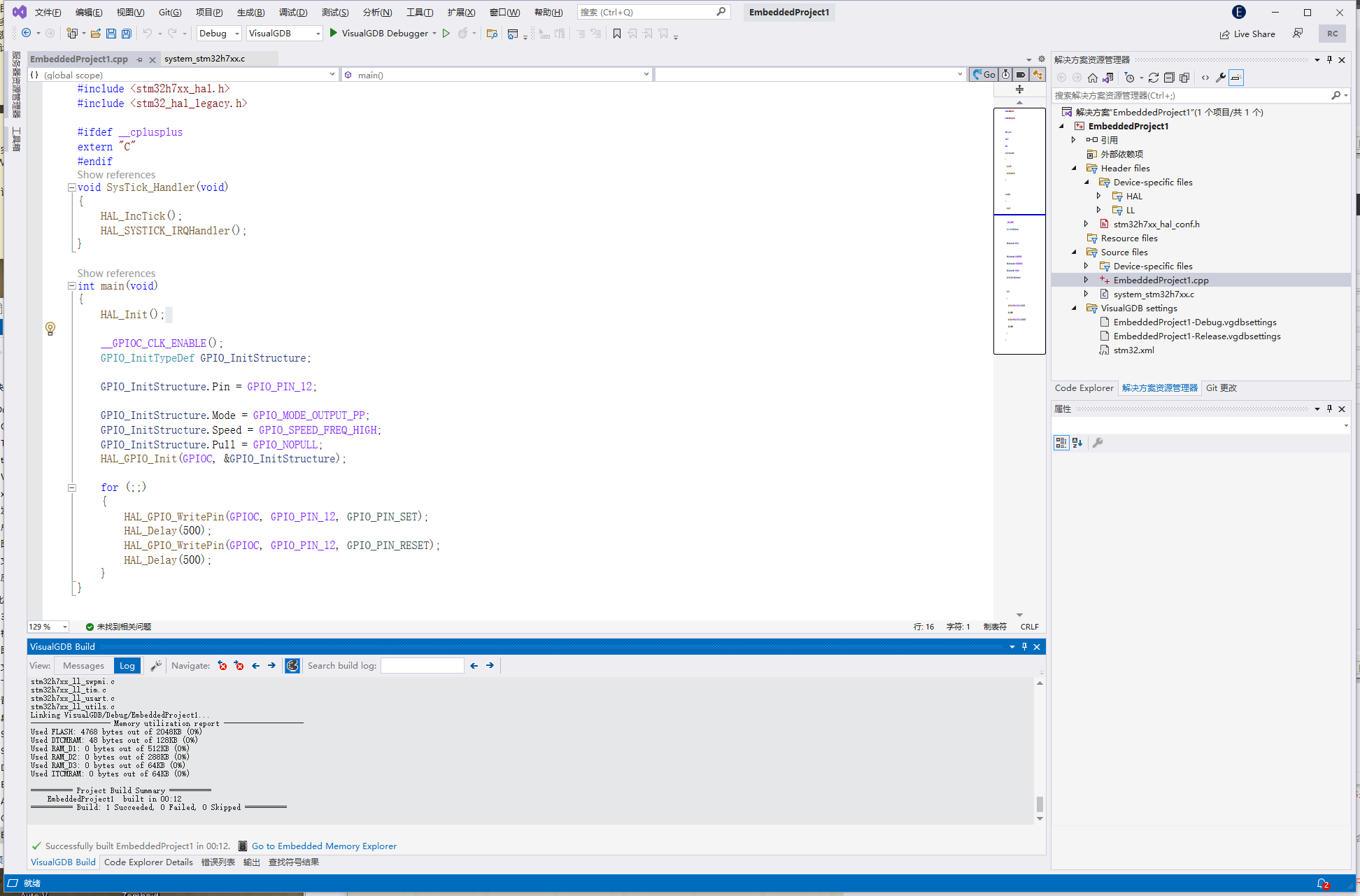
后期还可以通过工程属性修改Debug选项,本质上也是用arm-none-eabi的解决方案
问题
很明显,VisualGDB把.s的启动文件给隐藏了,关键是藏哪里了还找不到,整个工程里根本没有
其次RAM的编排文件好像没有,也就是每块RAM的分割或者分配,好像就控制不了。
创建RTOS的工程
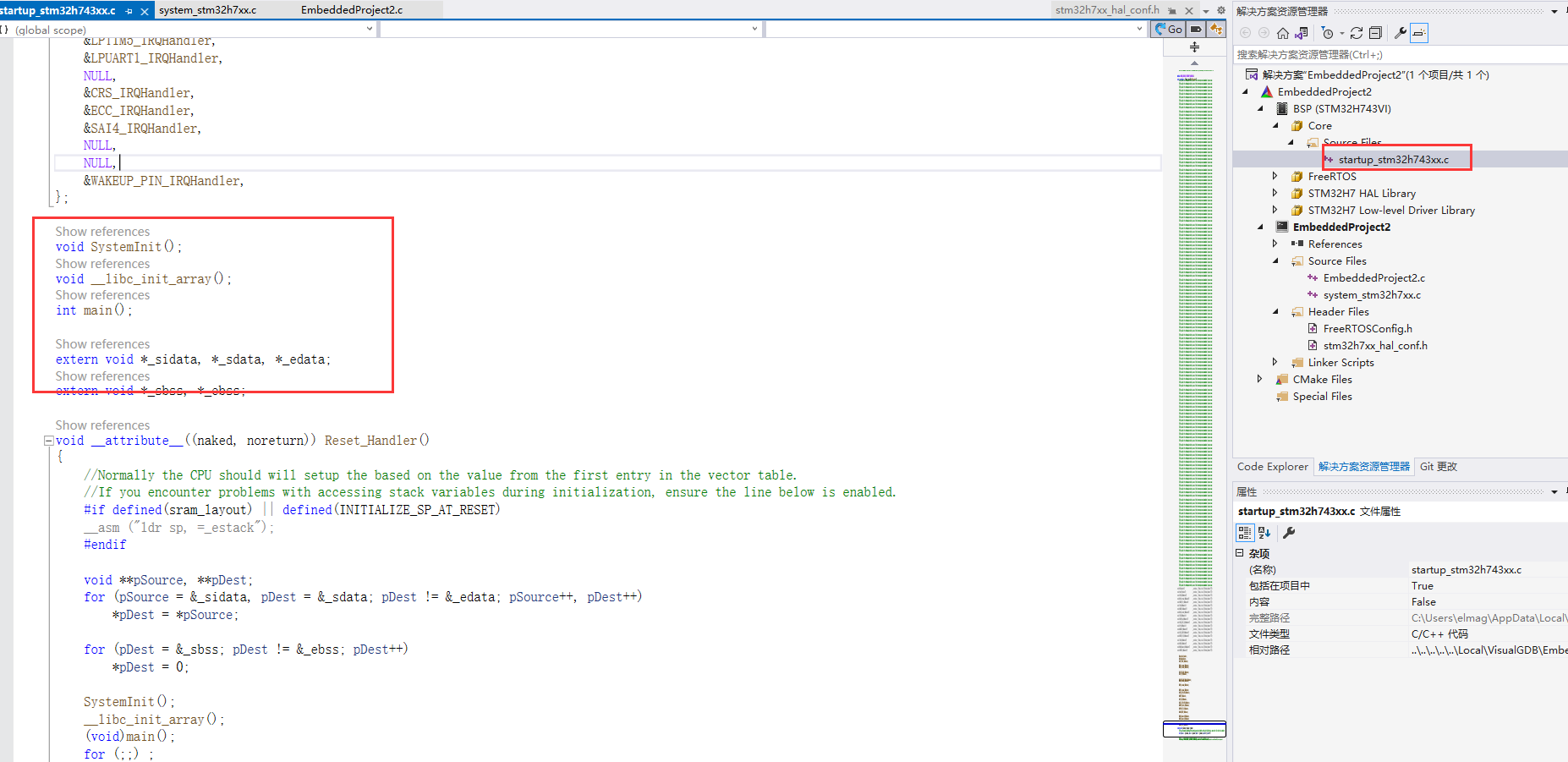
选择FreeRTOS,然后重建工程,其他流程相同
可以看到,原本的汇编启动文件,这里直接变成了C文件,然后启动流程上基本和汇编一样。
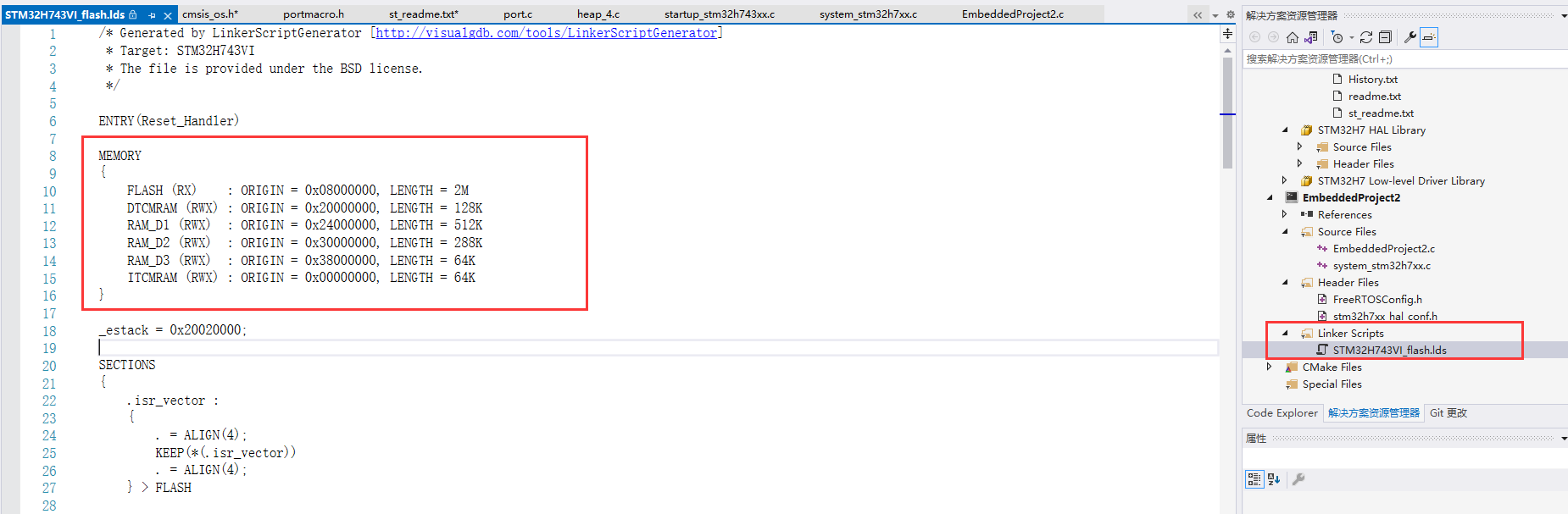
在工程链接里总算找到了内存分块的地方
Summary
总体上来说VisualGDB比起VS Code的集成度要高上不少,唯一的问题在于如果出了问题,想找解决方案比较困难。
VisualGDB他的工程模板直接就是C++的方式,所以他把C++需要用的库基本都整合进去了,那就比较方便C++开发
还有一点,就是我想做的方案是可以跨平台的,可以在其他地方部署,自动完成编译,目前来看如果选择了VisualGDB,那么就有些困难了
Quote
https://blog.csdn.net/fox0815/article/details/104418131