Foreword
最近打算做寻路方面的一些工作,这里介绍一些常用寻路算法,后面可能会给出一个我的解答
寻路与轨迹规划
一般说寻路的时候可能包含了2个概念,一个是寻路,一个是轨迹规划,这里我们区分开二者:
- 寻路单指 path planning,主要是找到一条可行路径,不考虑具体对象是以何种速度或者状态通过的,多数时候都是有路径就可以了,轨迹一般使用的都比较简单。
- 轨迹规划指 trajectory planning,主要描述的是如何通过一条路径,其输出的是每个时刻该对象的各种状态,对于2维小车寻路来说那就只有他的水平xy的速度,加速度,方向而已,对于3维无人机,那输出的除了方向速度以外可能还有无人机本身的姿态要求。
当前的火热的无人车,自动驾驶都需要上面二者的相关技术,只是他们考虑的更多,更复杂了。
而这里主要是介绍 path planning相关的内容,可能会提到一点点轨迹规划。
基础算法
目前常用的规划算法,大概只有几类,这里一一介绍
Dijkstra
Dijkstra算法基本高中的数学课本就有了,算是最基础的算法之一了。
https://www.cnblogs.com/gaochundong/p/dijkstra_algorithm.html
它本质上是一种 Greedy Algorithm,他的基础框架是这样的,剩下基于这个算法做出的改进或者演变什么的就不提了,总的来说Dijkstra比较慢,适合静态地图,适用范围广,但是实用性比较低。
Astar
一般来说Dijkstra可以理解为广度优先搜索,而Astar就是深度优先搜索,Dijkstra一般搜索一点到所有点的最短,而Astar比较专注于目标点相关的路径,所以Astart用的比较多。Astar也是Greedy Algorithm,所以在某些情况下可能会找不到目标,从而变成一个不完备的算法。
https://www.gamedev.net/reference/articles/article2003.asp
https://www.cnblogs.com/iwiniwin/p/10793654.html
这里面Astar经常搭配一个启发函数,然后变成启发式搜索,相当于是给了一个粗略的可以估计目标所在方向的函数,让Astar朝着这个大致方向进行搜索,从而提高了搜索效率,启发式Astar被广泛的使用在游戏行业中。
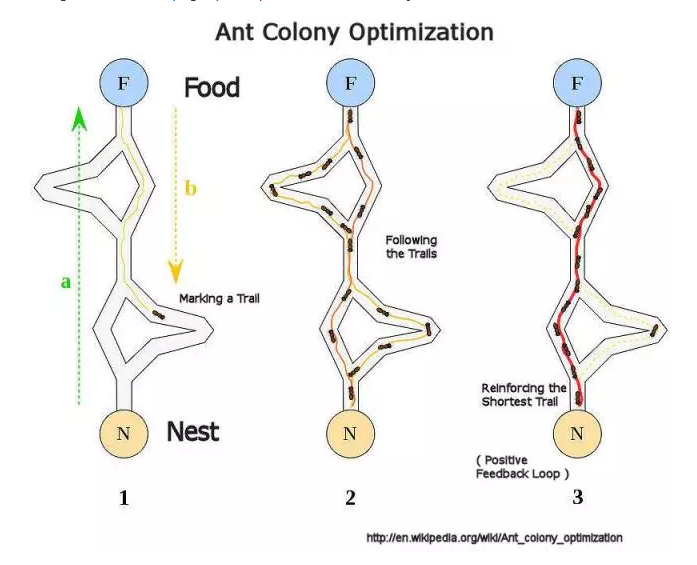
蚁群算法
某种程度上说蚁群算法都不能叫寻路算法,因为本质上他是一种带正反馈的穷举,不断遍历,然后得到一个最优解,需要大量的算力和时间,某种程度上说可用范围很小。
https://blog.csdn.net/xyisv/article/details/79184815
人工势场法
简单说就是人往高处走,水往低处流,通过构造一个势场函数,让地图成为一个有高低落差的图,然后起点成为高势点,目标作为低势点,从而模拟物理中的流动。
https://zhuanlan.zhihu.com/p/66265861
但是这种方法往往也有一些问题,环境可能非常复杂,导致构建出来的场景中存在局部最小值,导致没到达目标点就停止移动了。
以上算是基础的寻路算法,当然也能叫他们搜索算法,本质上是找到一种数据集合中最合适的一个或者一串点。
在线Pathfinding
http://qiao.github.io/PathFinding.js/visual/
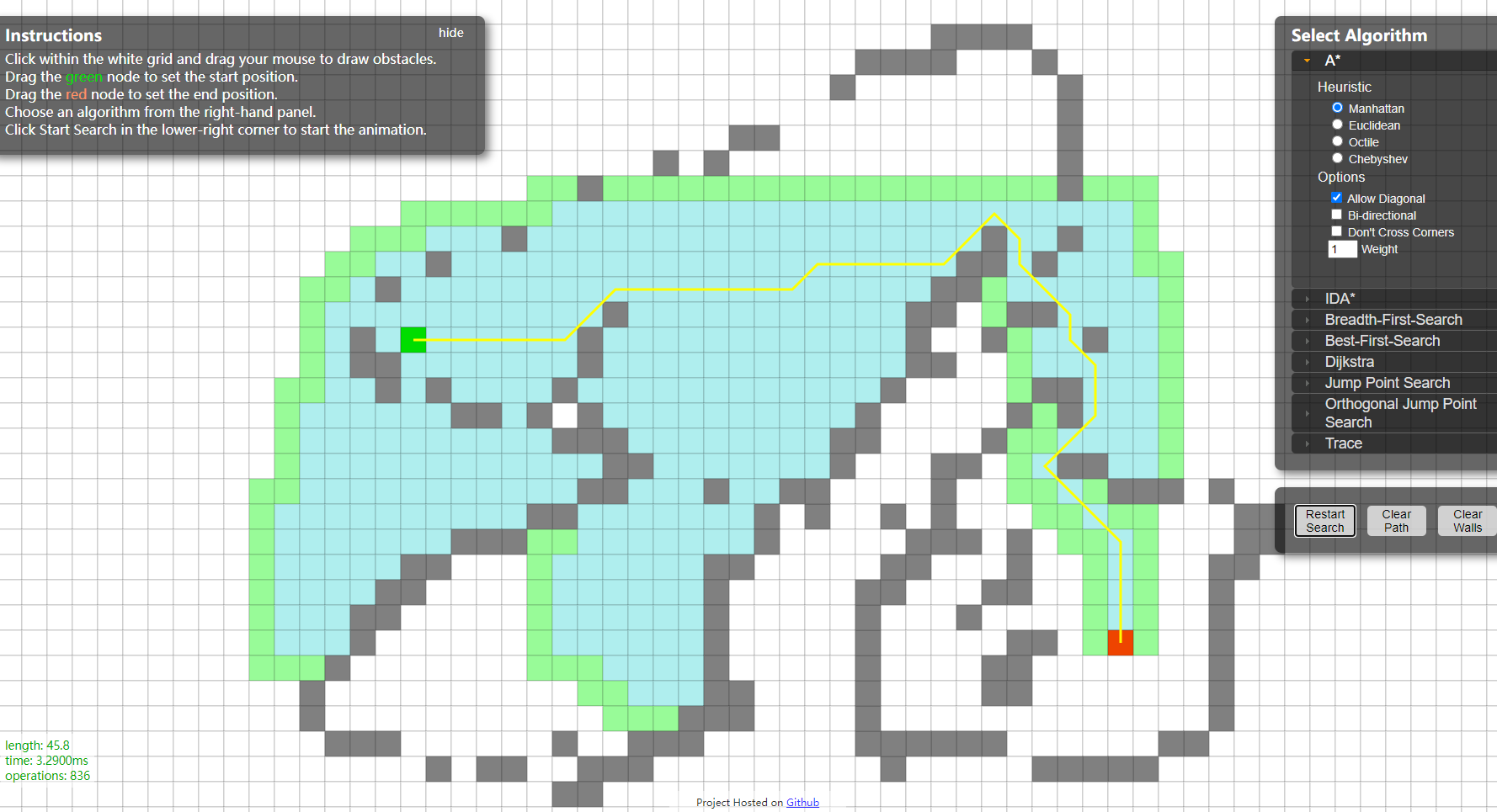
可以通过这里尝试在线寻路,了解一下不同算法的异同。
-
A*,正常的Astar
- IDA*,迭代加深的Astar,为了克服Astart在某些情况下不够完备,说白了就是给代价函数给定了上下界,让他有界了
- Breadth-First-Search,广度优先搜索
- Best-First-Search,最佳优先搜索,可以认为是广度优先搜索+启发式
- Dijkstra
- jump point search,简称JPS,经常被做最快的搜索算法,但是他有很多限制,比如他没有权重,也就是认为路径要么是能走,要么是不能走,就2种状态,就让他的适用范围变得比较小了。
- orthogonal jump point search,正交JPS,可以看到和jps的扩展方式不同
Summary
上面只是最基础的寻路算法,有了寻路算法还需要构建地图,还需要规划运动轨迹,最后将三者结合起来形成一个寻路的解决方案。
寻路算法在这里看起来更像是一个搜索问题,下一篇介绍如何离散化地图,然后应用上面的搜索算法,得到我们要的路径。
Quote
https://mp.weixin.qq.com/s?__biz=MzA5MDE2MjQ0OQ==&mid=2652786406&idx=1&sn=f937dd6aa91344fed689baf51dc821ab&scene=21#wechat_redirect
https://zhuanlan.zhihu.com/p/104056027?utm_source=qq