Foreword
在工业领域,需要使用可靠性非常强的协议,并且对于延迟要求也很高,如果同时这个协议本身也具有高拓展性,那就更好了,这里主要是从CAN出发,看看相关在CAN之上的协议层有哪些可以选择。
类CAN协议层
CANaerospace
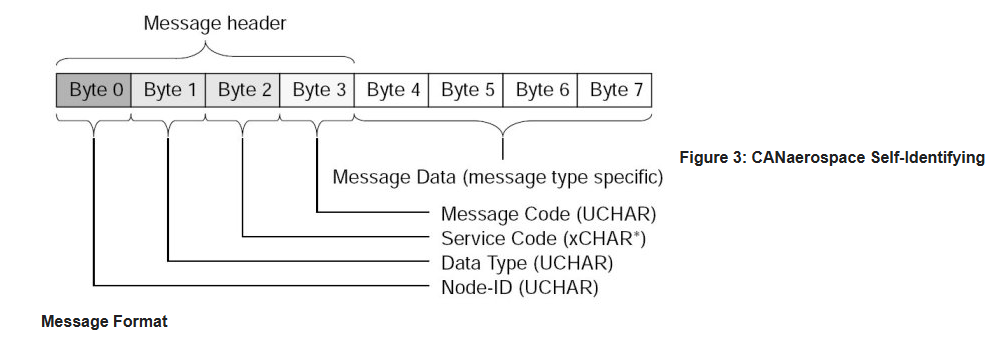
CANaerospace是专为航空电子系统设计的通信协议,基于CAN总线技术,用于满足机载设备对实时性和可靠性的严苛要求。CANaerospace底层对CAN的payload重新定义了,将整个CAN总线设计成了网状,允许一对一和一对n通信。
设计的思路还是比较简单的,说白了就是给各个节点约定好的数据类型和数据值,具体这个数据干啥用的靠Service Code和Message Code区分
DDS
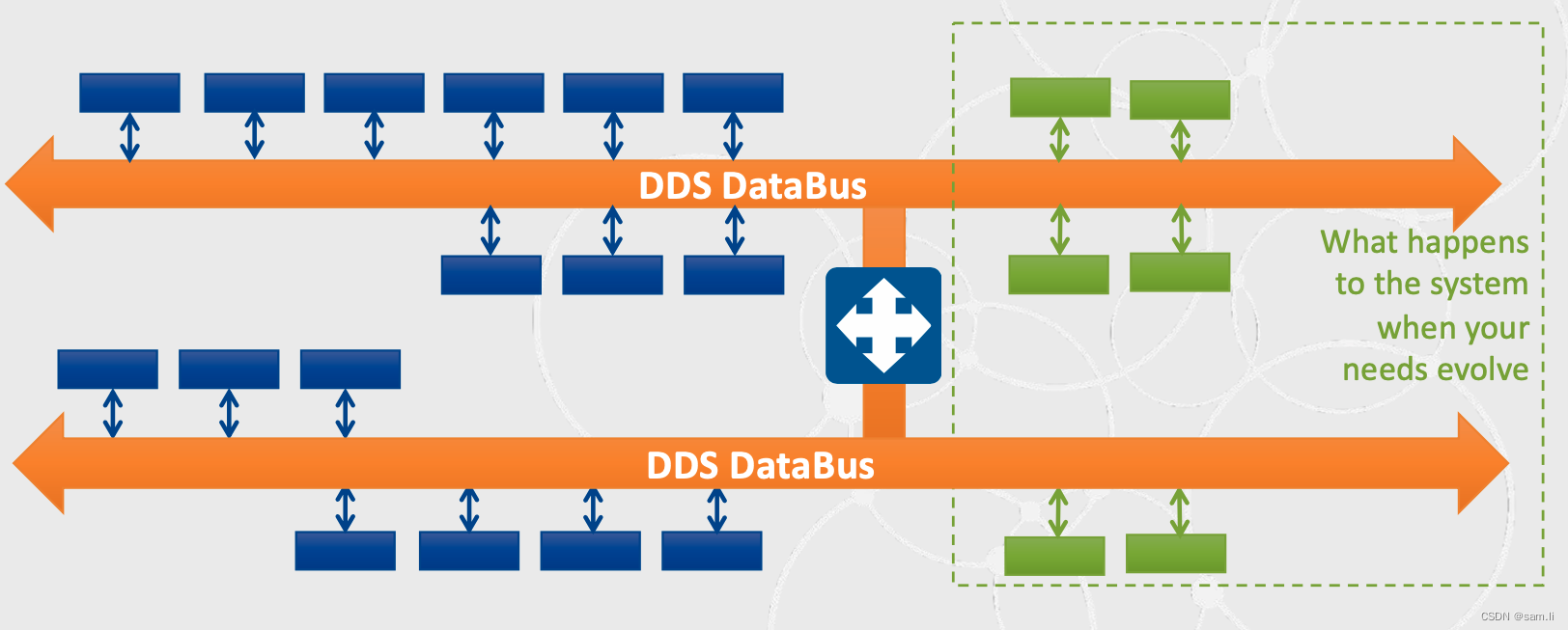
DDS主要是用在自动驾驶方面的技术栈,核心思路也是把传感器之类的东西变成总线式的交互,这样防止系统过于复杂,底层还是靠CAN来实现数据链路层
CANopen
https://www.analog.com/cn/lp/001/primer-network-management-CANopen-protocols.html
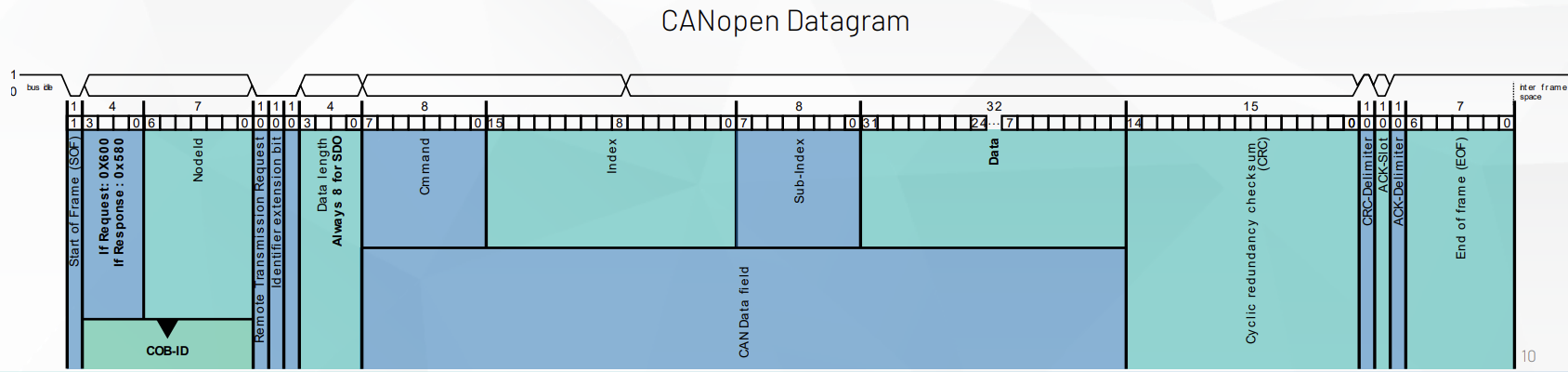
CANopen,类似地按照节点和对象字典来区分,CANopen把节点ID给固定死了,设备能用的一开始就规定死了
┌──────────────┬─────────┬──────────────────┬─────────┐
│ CAN 标识符 │ RTR │ 数据字段 │ CRC │
│ COB-ID │ │ 0-8 字节 │ │
│ 11 bits │ 1 bit │ │ │
└──────────────┴─────────┴──────────────────┴─────────┘
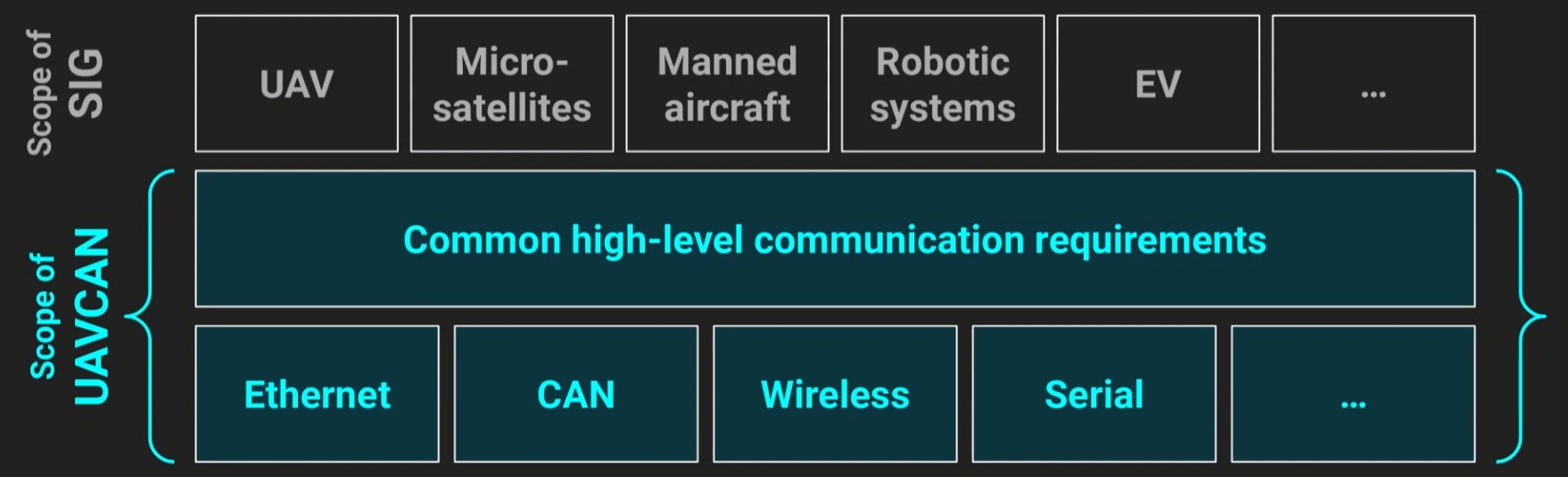
UAVCAN
https://legacy.uavCAN.org/
DroneCAN 和 Cyphal 都是早先一个叫做UAVCAN的项目。在2022年,该项目分为两个部分:原始版本的 UAVCAN (UAVCAN v0) 更名为 DroneCAN,较新的 UAVCAN v1 更名为 Cyphal。这两项协议之间的差异在Cyphal vs. DroneCAN中作了概述。
总体来说UAVCAN在当时的0.9版本已经较为广泛使用了,不好再做改动,所以在这里进行了分化。
UAVCAN对于发布订阅模型支持是不太完善的,传输层和应用层的解耦也没做好,还有一些其他缺点,最后导致了版本分化
DroneCAN
https://droneCAN.github.io/Specification/1._Introduction/
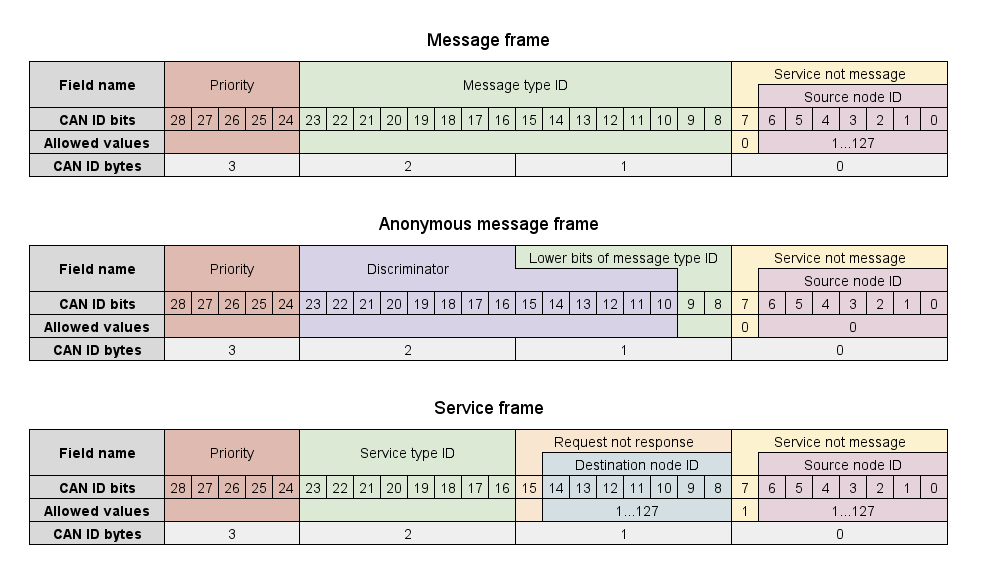
DroneCAN只支持29bits的扩展标识符,老协议不支持。
DroneCAN在无人机领域使用非常广泛,近百万的设备在用,这是他目前的优势,可以接入的设备都比较多,但是缺点也很明显,而且未来发展的趋势基本也都是往Cyphal走了
支持DroneCAN的传感器或者模块也比较多了
电调(ESC): Zubax Orel, CUAV NEO, Holybro GNSS: Here3, Zubax GNSS 电源模块: CUAV HV PM, Pomegranate Systems 气压计、磁力计、激光测距等
Cyphal
https://opencyphal.org/
https://forum.opencyphal.org/t/the-cyphal-guide/778
https://github.com/OpenCyphal
┌──────────────────────────────────────────┐
│ 应用层 (Application Layer) │
│ - 诊断、配置、物理量定义等 │
├──────────────────────────────────────────┤
│ 表示层 (Presentation Layer) │
│ - DSDL 数据结构描述语言 │
│ - 序列化/反序列化规则 │
├──────────────────────────────────────────┤
│ 传输层 (Transport Layer) |
│ - Cyphal/CAN, Cyphal/UDP, Cyphal/Serial│
└──────────────────────────────────────────┘
Cyphal核心机制还是发布订阅模型,也支持C/S模式下的请求响应模型,在表示层使用了DSDL去描述数据类型,简化了上层做数据转换的压力
同时Cyphal在协议层就允许不同版本之间进行通信,有足够大的兼容性
资源占用对比
Flash 占用(代码大小)
| 协议 | 最小配置 | 典型配置 | 完整功能 | 相对大小 |
|---|---|---|---|---|
| DroneCAN | ~10 KB | 15-30 KB | 40-60 KB | ⭐⭐ 小 |
| Cyphal | ~15 KB | 30-50 KB | 60-100 KB | ⭐⭐⭐ 中等 |
| CANopen | ~20 KB | 40-80 KB | 100-200 KB | ⭐⭐⭐⭐ 大 |
| CANaerospace | ~15 KB | 25-40 KB | 50-80 KB | ⭐⭐⭐ 中等 |
RAM 占用(运行时内存)
| 协议 | 静态 RAM | 动态 RAM(每连接) | 栈空间 | 总需求 |
|---|---|---|---|---|
| DroneCAN | 2-5 KB | 0.5-1 KB | 1-2 KB | ~4-8 KB |
| Cyphal | 4-8 KB | 1-2 KB | 2-4 KB | ~8-15 KB |
| CANopen | 8-15 KB | 2-4 KB | 2-4 KB | ~15-25 KB |
| CANaerospace | 3-6 KB | 1-2 KB | 1-2 KB | ~6-10 KB |
CPU 占用(处理开销)
| 协议 | 消息解析 | 协议开销 | 实时性 | CPU 负载 |
|---|---|---|---|---|
| DroneCAN | 简单快速 | 低 | 优秀 | ~1-3% @ 500Kbps |
| Cyphal | 中等复杂 | 中等 | 良好 | ~3-5% @ 500Kbps |
| CANopen | 较复杂 | 较高 | 中等 | ~5-10% @ 500Kbps |
| CANaerospace | 中等 | 低 | 优秀 | ~2-4% @ 500Kbps |
最小硬件要求对比
| 协议 | 最小 Flash | 最小 RAM | 推荐 MCU | 示例芯片 |
|---|---|---|---|---|
| DroneCAN | 32 KB | 8 KB | Cortex-M0+ | STM32F0, STM32G0 |
| Cyphal | 64 KB | 16 KB | Cortex-M3 | STM32F1, STM32L4 |
| CANopen | 64 KB | 16 KB | Cortex-M3 | STM32F1, STM32F4 |
| CANaerospace | 48 KB | 12 KB | Cortex-M0+ | STM32F0, STM32G4 |
占用比我想得还要大,如果只是一些小模块使用,确实有点太过了,特别是对成本敏感的项目
Summary
CANopen: █████████████████████ 1000万+ 设备
DroneCAN: ████████ 50-100万 设备
Cyphal: ███ 1-5万 设备
CANaerospace: ██ 数千-1万 设备
Quote
https://docs.px4.io/main/zh/CAN/index