Foreword
绕了这么大一圈,似乎只有kconfig是比较成熟的,能与之相媲美的管理工具很少
Kconfig
安装
在windows下使用Kconfig,至少得有python,否则界面等内容无法正常显示
python需要先安装这几个包
python -m pip install windows-curses
python -m pip install kconfiglib
测试安装,可以正常显示命令
menuconfig -h
测试
参考工程sample_1
https://github.com/bobwenstudy/test_kconfig_system
编译所有
make all
修改配置
menuconfig
运行main.exe就能看到结果了
hello, world
CONFIG_TEST_ENABLE
CONFIG_TEST_SHOW_STRING: Test 123
CONFIG_TEST_SHOW_INT: 123
CONFIG_TEST_SUB_0_ENABLE
CONFIG_TEST_SHOW_SUB_INT: 123
可能会报错,这个是因为curses库他需要终端执行,但是不识别你当前使用的终端,换一个就行了,比如cmd
make 提示Redirection is not supported.
这个例子里还只有一种config,还不能支持多config配置,可以看到主要就只能生成一个autoconfig.h
all: main.o
gcc main.o -o main
main.o: main.c autoconfig.h
gcc main.c -c -o main.o
clean:
del main.o main.exe
autoconfig.h:.config
python ../scripts/kconfig.py Kconfig .config autoconfig.h log.txt .config
.config:
menuconfig
menuconfig:
menuconfig
多config
# 默认编译test1
APP ?= app/test1
OUTPUT_PATH := output
INCLUDE_PATH := -I$(APP) -Idriver -I$(OUTPUT_PATH)
# 主要用户定义的配置是在每个app下的,这里也可以单独提取一个对应的版本目录来做
# define user .config setting
USER_CONFIG_SET :=
USER_CONFIG_SET += $(APP)/prj.conf
# define menuconfig .config path
DOTCONFIG_PATH := $(OUTPUT_PATH)/.config
# 用户文件追踪
# define user merged path
USER_RECORD_CONFIG_PATH := $(OUTPUT_PATH)/user_record.conf
# define autoconfig.h path
AUTOCONFIG_H := $(OUTPUT_PATH)/autoconfig.h
#define Kconfig path
KCONFIG_ROOT_PATH := Kconfig
#For windows work.
FIXPATH = $(subst /,\,$1)
all: $(APP)/main.o driver/driver_test.o
gcc $^ -o $(OUTPUT_PATH)/main.exe
$(APP)/main.o: $(APP)/main.c
gcc $< $(INCLUDE_PATH) -c -o $@
driver/driver_test.o: driver/driver_test.c $(AUTOCONFIG_H)
gcc $< $(INCLUDE_PATH) -c -o $@
clean:
del /q /s $(call FIXPATH, $(APP)/main.o driver/driver_test.o $(OUTPUT_PATH))
# 根据对应的autoconfig的目录来生成
$(AUTOCONFIG_H):$(DOTCONFIG_PATH)
python ../scripts/kconfig.py $(KCONFIG_ROOT_PATH) $(DOTCONFIG_PATH) $(AUTOCONFIG_H) $(OUTPUT_PATH)/log.txt $(DOTCONFIG_PATH)
# 从用户的项目路径里拿刀用户定义的config
$(USER_RECORD_CONFIG_PATH): $(USER_CONFIG_SET)
@echo Using user config.
# create user_record.conf to record current setting.
@copy $(call FIXPATH, $^) $(call FIXPATH, $@)
# create .config by user config setting.
python ../scripts/kconfig.py --handwritten-input-configs $(KCONFIG_ROOT_PATH) $(DOTCONFIG_PATH) $(AUTOCONFIG_H) $(OUTPUT_PATH)/log.txt $(USER_CONFIG_SET)
export KCONFIG_CONFIG=$(DOTCONFIG_PATH)
$(DOTCONFIG_PATH):$(USER_RECORD_CONFIG_PATH)
@echo .config updated
menuconfig:$(DOTCONFIG_PATH)
# set KCONFIG_CONFIG=$(DOTCONFIG_PATH)
menuconfig $(KCONFIG_ROOT_PATH)
对应这样的配置就可以使用下面的方式来独立生成每个APP的配置,这样就可以同时维护多个版本,而要多一个APP,就再加一个配置就行了
make APP=app\test1
make APP=app\test2
上面这个配置还少了一点,生成的都是同一个文件,同一个目录,互相覆盖,其实可以参考OpenWRT,每次不同配置生成都在不同文件夹里,然后对应文件名就更好了
再次改进
APP ?= app/test1
OUTPUT_PATH := output/$(APP)
TARGET := main
INCLUDE_PATH := -I$(APP) -Idriver -I$(OUTPUT_PATH)
# define user .config setting
USER_CONFIG_SET :=
USER_CONFIG_SET += $(APP)/prj.conf
# define menuconfig .config path
DOTCONFIG_PATH := $(OUTPUT_PATH)/.config
# define user merged path
USER_RECORD_CONFIG_PATH := $(OUTPUT_PATH)/user_record.conf
# define autoconfig.h path
AUTOCONFIG_H := $(OUTPUT_PATH)/autoconfig.h
#define Kconfig path
KCONFIG_ROOT_PATH := Kconfig
#For windows work.
FIXPATH = $(subst /,\,$1)
all: $(APP)/main.o driver/driver_test.o
gcc $^ -o $(OUTPUT_PATH)/$(TARGET).exe
$(APP)/main.o: $(APP)/main.c | $(OUTPUT_PATH)
gcc $< $(INCLUDE_PATH) -c -o $@
driver/driver_test.o: driver/driver_test.c $(AUTOCONFIG_H)
gcc $< $(INCLUDE_PATH) -c -o $@
$(OUTPUT_PATH):
@mkdir $(call FIXPATH, $@)
clean:
del /q /s $(call FIXPATH, $(APP)/main.o driver/driver_test.o $(OUTPUT_PATH))
$(AUTOCONFIG_H):$(DOTCONFIG_PATH)
python ../scripts/kconfig.py $(KCONFIG_ROOT_PATH) $(DOTCONFIG_PATH) $(AUTOCONFIG_H) $(OUTPUT_PATH)/log.txt $(DOTCONFIG_PATH)
$(USER_RECORD_CONFIG_PATH): $(USER_CONFIG_SET)
@echo Using user config.
# create user_record.conf to record current setting.
@copy $(call FIXPATH, $^) $(call FIXPATH, $@)
# create .config by user config setting.
python ../scripts/kconfig.py --handwritten-input-configs $(KCONFIG_ROOT_PATH) $(DOTCONFIG_PATH) $(AUTOCONFIG_H) $(OUTPUT_PATH)/log.txt $(USER_CONFIG_SET)
export KCONFIG_CONFIG=$(DOTCONFIG_PATH)
$(DOTCONFIG_PATH):$(USER_RECORD_CONFIG_PATH)
@echo .config updated
menuconfig:$(DOTCONFIG_PATH)
# set KCONFIG_CONFIG=$(DOTCONFIG_PATH)
menuconfig $(KCONFIG_ROOT_PATH)
稍微修改一下,增加路径自动创建,这样后续就可以不同配置生成到不同目录中,不会互相覆盖了。同时也自动适配生成的文件名和路径分割符
当然这个Makefile还是有一些缺点,比如所有要编译的.c和.o都得一个个加,还是有点傻
可视化
Kconfig发展了这么久,难道没有人想着用VScode来做一下可视化嘛,事实上是有的,但是也都有限,不是很通用
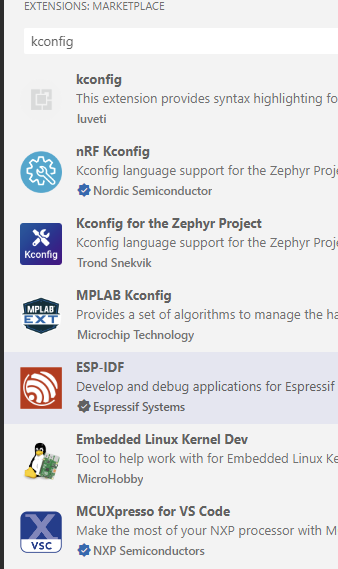
第一个插件只能提供kconfig的语法高亮,不能解决显示问题
第二个就是nRF Kconfig,下面的Konfig for Zephyr Project也停止开发,转而使用nRF Kconfig了
https://marketplace.visualstudio.com/items?itemName=nordic-semiconductor.nrf-kconfig
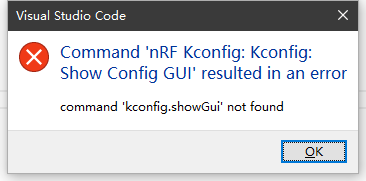
nRF Kconfig想要用起来还稍微有点麻烦,直接启动不了,所以单独开个段落说明如何使用。
至于非VScode的版本,基本上大部分都是依赖kconfiglib的python库完成显示,或者是结合一下TUI、Tkinter等比较轻量化的框架实现,而整体交互逻辑依然离不开比较原始的上下左右菜单式的
https://github.com/ulfalizer/Kconfiglib
https://github.com/cuinixam/kspl
https://github.com/CoryXie/SConf
ESP-IDF
其他Kconfig,比如ESP-IDF,就可以很好的体现esp的kconfig内容
但是ESP是专用的,并不适用于其他开发环节或者板子,而且体积很大
nRF SDK Demo
Demo体验
由于要启动kconfig必须要配置完工程才能启动,所以记录一下nRF SDK是怎么启动、编译的
- nRF也从SES逃离了,投入VSCode的怀抱了,我SES反馈的问题,SES官方就改了一个,其他的问题都视而不见,无语
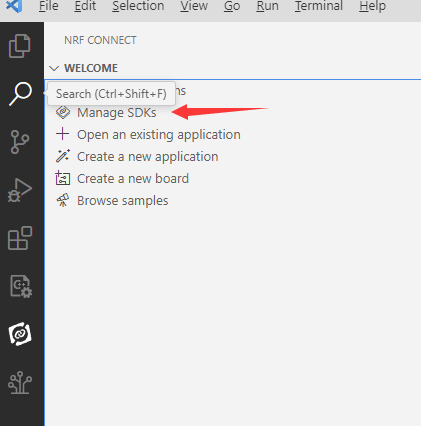
首先安装nRF Connect Extendtion Pack
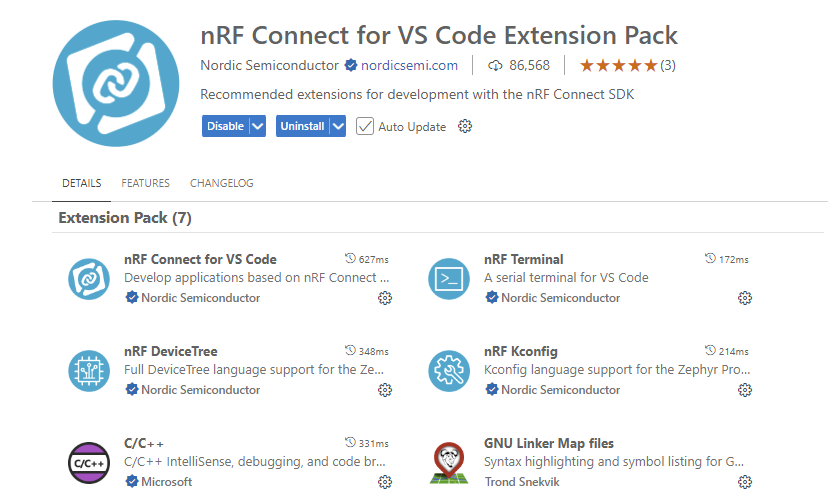
其实相当于是插件包,我细看了一下,基本上需要的开发环境他都给你打包整合好了,设备树、Kconfig、Cmake、调试、Flash等等工具都有,相当于就是一个IDE了
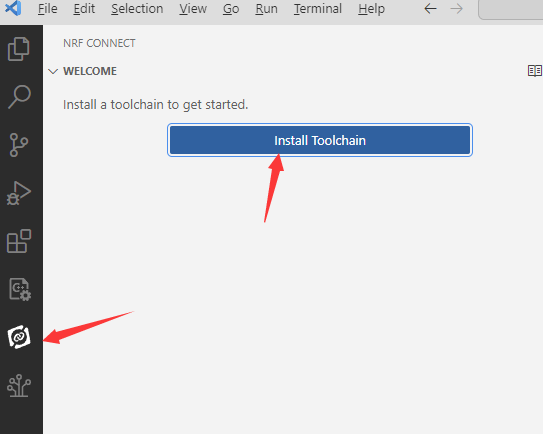
选择一个工具链,然后等安装完成,这里直接选最新的就行了
继续安装SDK,选择一个路径安装,回车后等待完成
- SDK都有点大,会拉很多Tag进来,最好提前准备好翻墙相关内容
- 2.8.0的SDK貌似拉不下来?,所以切换到2.7.0才正常,对应前一步的toolchains也需要调整到2.7.0
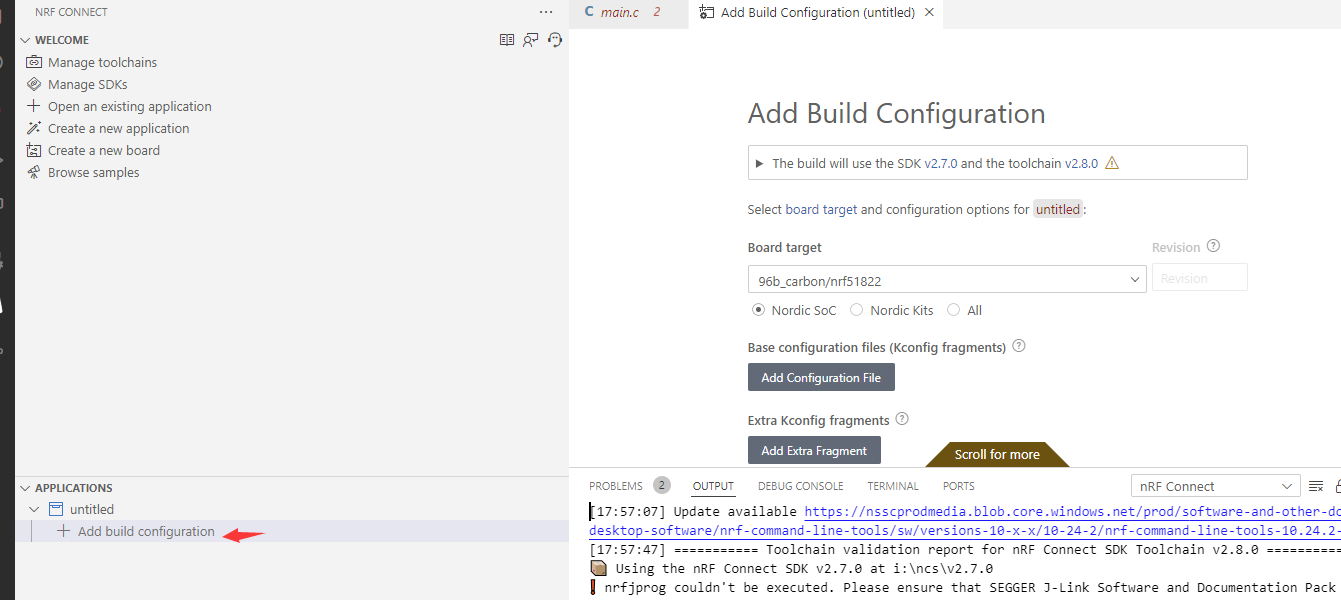
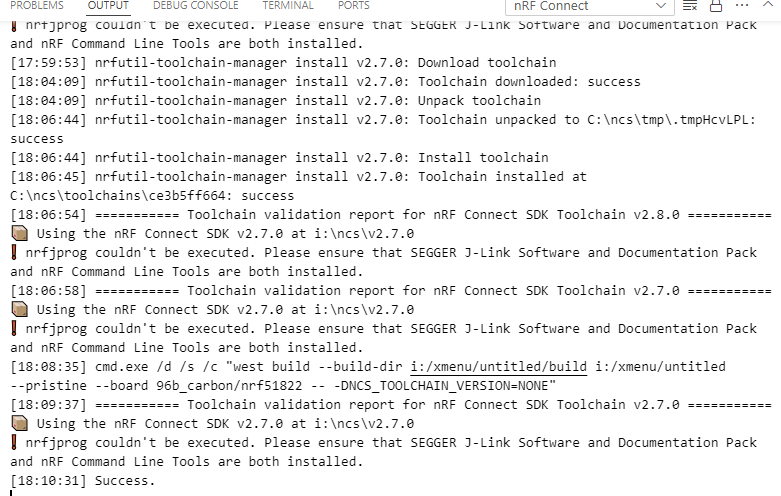
新建一个应用,然后添加编译配置,选择板子,构建配置,开始编译
编译完成,但是注意一下新工程里面没有Kconfig,但是ACtion里已经可以显示Kconfig UI了
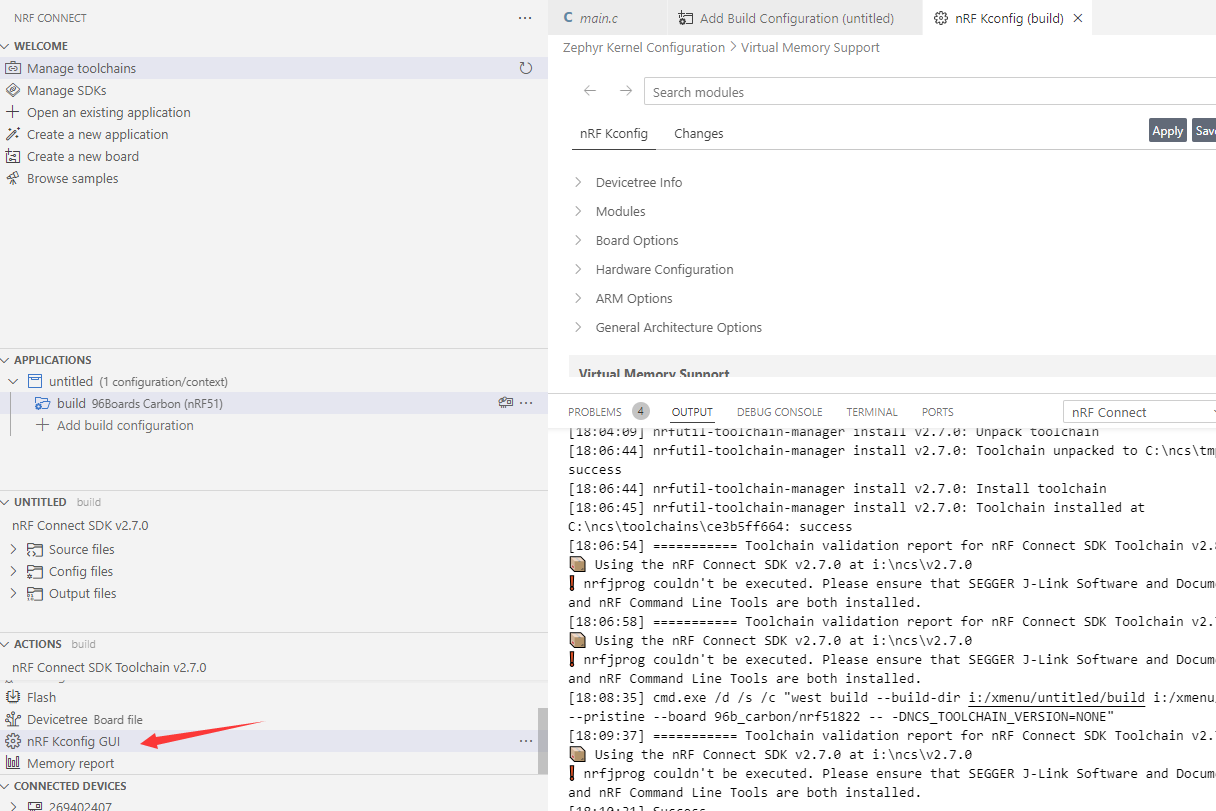
untitled
经过测试nRF的Kconfig GUI无法直接打开前面的sample_2工程,显示非nRF工程
这里详细分析一下untitled的默认工程
untitled一共三个文件
mian.c
CMakeLists.txt
prj.conf
prj.conf中直接是空白的,main中也没啥特殊内容,主要就是CMakeLists可以被识别?
cmake_minimum_required(VERSION 3.20.0)
find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE})
project(untitled)
target_sources(app PRIVATE src/main.c)
实际CMakeLists中的内容也非常少
实际把prj.conf直接复制到sample_2中,Kconfig就可以打开了,但是发现打开的还是untitled的config,而不是sample_2的
关掉其他文件,再打开GUI,就无法启动了。
这里绑定有点深,必须CMakeLists,必须要在build以后才能用GUI,否则无法直接打开GUI界面
而添加Build Config以后,Build文件夹中的内容非常复杂,非常多内容
nordic-semiconductor.nrf-kconfig
看了一眼nRF Kconfig,源码竟然还是python,也就是跑这个必须有对应的python环境,否则还跑不起来,怪不得那个工具链安装好久,原来在下python。python本质上还是调用kconfiglib库来完成kconfig的解析,最后再转成数据送给VS 前端去加载显示
目前看起来源码没有做加密或者混淆,所以要改一个非nRF强关联的版本,应该是比较容易的
vscode-kconfig
回过头再看Zephyr的kconfig,这个竟然是开源项目,那么只需要搞定他的入口,就可以显示任何kconfig了
https://github.com/trond-snekvik/vscode-kconfig
后续计划一下改出来一个带UI的通用版本
Summary
目前看只有Zephyr和nRF的Kconfig结合比较深,后续可能还会详细分析一下Zephyr的整体架构是什么样的,整个build是怎么串起来的
Quote
https://github.com/bobwenstudy/test_kconfig_system
https://stackoverflow.com/questions/68748824/how-to-fix-redirection-is-not-supported
https://docs.nordicsemi.com/bundle/nrf-connect-vscode/page/get_started/install.html
https://docs.nordicsemi.com/bundle/ncs-latest/page/nrf/installation/install_ncs.html