Foreword
先说一下遇到的问题,I2C的SDA或者SCL信号线,只要拉低一段时间,必然造成系统锁死,触发看门狗。
然后骂一句,坑爹的HAL库。
环境
- stm32f7系列
- I2C使用stm32硬件的
- FreeRTOS9.0
- HAL库V1.2.2
I2C自锁
先假设总线上只有2个设备,一个是主,一个是从。闲时,总线一直是拉高的,通信是由主设备给时钟信号开始,拉低给起始位,然后地址、数据、停止位,接着就是从设备回复信息,也一样是从拉低开始。
在I2C主设备进行读写操作的过程中,主设备在开始信号后控制SCL产生8个时钟脉冲,然后拉低SCL信号为低电平,在这个时候,从设备输出应答信号,将SDA信号拉为低电平。
如果这个时候主设备异常复位,SCL就会被释放为高电平。此时,如果从设备没有复位,就会继续I2C的应答,将SDA一直拉为低电平,直到SCL变为低电平,才会结束应答信号。
而对于I2C主设备来说.复位后检测SCL和SDA信号,如果发现SDA信号为低电平,则会认为I2C总线被占用,会一直等待SCL和SDA信号变为高电平。
这样,I2C主设备等待从设备释放SDA信号,而同时I2C从设备又在等待主设备将SCL信号拉低以释放应答信号,两者相互等待,I2C总线进人一种死锁状态。
同样,当I2C进行读操作,I2C从设备应答后输出数据,如果在这个时刻I2C主设备异常复位而此时I2C从设备输出的数据位正好为0,也会导致I2C总线进入死锁状态。
会造成自锁,有几个可能
- 电路上有干扰,导致一个信号突变为低
- 电路上短路,引脚直接接地了
- 掉电,硬件处于电压临界点,引脚电平处于一个临界状态,可能高可能低
但是呢这种自锁,在我这里是可以恢复的,不是大问题吧。
I2C HAL库
这里大概看一下HAL库中的 I2C的通信流程,这里以中断式通信为例
HAL_StatusTypeDef HAL_I2C_Mem_Write_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size)
{
uint32_t tickstart = 0U;
uint32_t xfermode = 0U;
/* Check the parameters */
assert_param(IS_I2C_MEMADD_SIZE(MemAddSize));
if(hi2c->State == HAL_I2C_STATE_READY)
{
if((pData == NULL) || (Size == 0U))
{
return HAL_ERROR;
}
if(__HAL_I2C_GET_FLAG(hi2c, I2C_FLAG_BUSY) == SET)
{
return HAL_BUSY;
}
/* Process Locked */
__HAL_LOCK(hi2c);
/* Init tickstart for timeout management*/
tickstart = HAL_GetTick();
hi2c->State = HAL_I2C_STATE_BUSY_TX;
hi2c->Mode = HAL_I2C_MODE_MEM;
hi2c->ErrorCode = HAL_I2C_ERROR_NONE;
/* Prepare transfer parameters */
hi2c->pBuffPtr = pData;
hi2c->XferCount = Size;
hi2c->XferOptions = I2C_NO_OPTION_FRAME;
hi2c->XferISR = I2C_Master_ISR_IT;
if(hi2c->XferCount > MAX_NBYTE_SIZE)
{
hi2c->XferSize = MAX_NBYTE_SIZE;
xfermode = I2C_RELOAD_MODE;
}
else
{
hi2c->XferSize = hi2c->XferCount;
xfermode = I2C_AUTOEND_MODE;
}
/* Send Slave Address and Memory Address */
if(I2C_RequestMemoryWrite(hi2c, DevAddress, MemAddress, MemAddSize, I2C_TIMEOUT_FLAG, tickstart) != HAL_OK)
{
if(hi2c->ErrorCode == HAL_I2C_ERROR_AF)
{
/* Process Unlocked */
__HAL_UNLOCK(hi2c);
return HAL_ERROR;
}
else
{
/* Process Unlocked */
__HAL_UNLOCK(hi2c);
return HAL_TIMEOUT;
}
}
/* Set NBYTES to write and reload if hi2c->XferCount > MAX_NBYTE_SIZE and generate RESTART */
I2C_TransferConfig(hi2c,DevAddress, hi2c->XferSize, xfermode, I2C_NO_STARTSTOP);
/* Process Unlocked */
__HAL_UNLOCK(hi2c);
/* Note : The I2C interrupts must be enabled after unlocking current process
to avoid the risk of I2C interrupt handle execution before current
process unlock */
/* Enable ERR, TC, STOP, NACK, TXI interrupt */
/* possible to enable all of these */
/* I2C_IT_ERRI | I2C_IT_TCI| I2C_IT_STOPI| I2C_IT_NACKI | I2C_IT_ADDRI | I2C_IT_RXI | I2C_IT_TXI */
I2C_Enable_IRQ(hi2c, I2C_XFER_TX_IT);
return HAL_OK;
}
else
{
return HAL_BUSY;
}
}
这里有几个关键点,可以看到这里I2C有一个超时时间,头文件中定义的式25ms,看起来还挺短的,好像没啥问题的样子。
实际仔细看一下这里的头文件中的几个超时的时间设置,其实他们都没用,真正被使用的只有I2C_TIMEOUT_FLAG和I2C_TIMEOUT_BUSY,其他都是个摆设。
/** @defgroup I2C_Private_Define I2C Private Define
* @{
*/
#define TIMING_CLEAR_MASK (0xF0FFFFFFU) /*!< I2C TIMING clear register Mask */
#define I2C_TIMEOUT_ADDR (10000U) /*!< 10 s */
#define I2C_TIMEOUT_BUSY (25U) /*!< 25 ms */
#define I2C_TIMEOUT_DIR (25U) /*!< 25 ms */
#define I2C_TIMEOUT_RXNE (25U) /*!< 25 ms */
#define I2C_TIMEOUT_STOPF (25U) /*!< 25 ms */
#define I2C_TIMEOUT_TC (25U) /*!< 25 ms */
#define I2C_TIMEOUT_TCR (25U) /*!< 25 ms */
#define I2C_TIMEOUT_TXIS (25U) /*!< 25 ms */
#define I2C_TIMEOUT_FLAG (25U) /*!< 25 ms */
if(I2C_RequestMemoryWrite(hi2c, DevAddress, MemAddress, MemAddSize, I2C_TIMEOUT_FLAG, tickstart) != HAL_OK)
再看一下I2C_RequestMemoryWrite具体怎么实现的
/**
* @brief Master sends target device address followed by internal memory address for write request.
* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains
* the configuration information for the specified I2C.
* @param DevAddress Target device address: The device 7 bits address value
* in datasheet must be shift at right before call interface
* @param MemAddress Internal memory address
* @param MemAddSize Size of internal memory address
* @param Timeout Timeout duration
* @param Tickstart Tick start value
* @retval HAL status
*/
static HAL_StatusTypeDef I2C_RequestMemoryWrite(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint32_t Timeout, uint32_t Tickstart)
{
I2C_TransferConfig(hi2c,DevAddress,MemAddSize, I2C_RELOAD_MODE, I2C_GENERATE_START_WRITE);
/* Wait until TXIS flag is set */
if(I2C_WaitOnTXISFlagUntilTimeout(hi2c, Timeout, Tickstart) != HAL_OK)
{
if(hi2c->ErrorCode == HAL_I2C_ERROR_AF)
{
return HAL_ERROR;
}
else
{
return HAL_TIMEOUT;
}
}
/* If Memory address size is 8Bit */
if(MemAddSize == I2C_MEMADD_SIZE_8BIT)
{
/* Send Memory Address */
hi2c->Instance->TXDR = I2C_MEM_ADD_LSB(MemAddress);
}
/* If Memory address size is 16Bit */
else
{
/* Send MSB of Memory Address */
hi2c->Instance->TXDR = I2C_MEM_ADD_MSB(MemAddress);
/* Wait until TXIS flag is set */
if(I2C_WaitOnTXISFlagUntilTimeout(hi2c, Timeout, Tickstart) != HAL_OK)
{
if(hi2c->ErrorCode == HAL_I2C_ERROR_AF)
{
return HAL_ERROR;
}
else
{
return HAL_TIMEOUT;
}
}
/* Send LSB of Memory Address */
hi2c->Instance->TXDR = I2C_MEM_ADD_LSB(MemAddress);
}
/* Wait until TCR flag is set */
if(I2C_WaitOnFlagUntilTimeout(hi2c, I2C_FLAG_TCR, RESET, Timeout, Tickstart) != HAL_OK)
{
return HAL_TIMEOUT;
}
return HAL_OK;
}
主要延迟是I2C_WaitOnTXISFlagUntilTimeout来判断的,通过注释可以看到第一个是真的是判定TXIS的超时判定,而最后一个I2C_WaitOnFlagUntilTimeout也是用前文中提到的I2C_TIMEOUT_FLAG来设定超时,其他宏定义就没用了。
这两个函数的具体实现差不多
/**
* @brief This function handles I2C Communication Timeout for specific usage of TXIS flag.
* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains
* the configuration information for the specified I2C.
* @param Timeout Timeout duration
* @param Tickstart Tick start value
* @retval HAL status
*/
static HAL_StatusTypeDef I2C_WaitOnTXISFlagUntilTimeout(I2C_HandleTypeDef *hi2c, uint32_t Timeout, uint32_t Tickstart)
{
while(__HAL_I2C_GET_FLAG(hi2c, I2C_FLAG_TXIS) == RESET)
{
/* Check if a NACK is detected */
if(I2C_IsAcknowledgeFailed(hi2c, Timeout, Tickstart) != HAL_OK)
{
return HAL_ERROR;
}
/* Check for the Timeout */
if(Timeout != HAL_MAX_DELAY)
{
if((Timeout == 0U)||((HAL_GetTick() - Tickstart) > Timeout))
{
hi2c->ErrorCode |= HAL_I2C_ERROR_TIMEOUT;
hi2c->State= HAL_I2C_STATE_READY;
hi2c->Mode = HAL_I2C_MODE_NONE;
/* Process Unlocked */
__HAL_UNLOCK(hi2c);
return HAL_TIMEOUT;
}
}
}
return HAL_OK;
}
/**
* @brief This function handles I2C Communication Timeout.
* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains
* the configuration information for the specified I2C.
* @param Flag Specifies the I2C flag to check.
* @param Status The new Flag status (SET or RESET).
* @param Timeout Timeout duration
* @param Tickstart Tick start value
* @retval HAL status
*/
static HAL_StatusTypeDef I2C_WaitOnFlagUntilTimeout(I2C_HandleTypeDef *hi2c, uint32_t Flag, FlagStatus Status, uint32_t Timeout, uint32_t Tickstart)
{
while(__HAL_I2C_GET_FLAG(hi2c, Flag) == Status)
{
/* Check for the Timeout */
if(Timeout != HAL_MAX_DELAY)
{
if((Timeout == 0U)||((HAL_GetTick() - Tickstart ) > Timeout))
{
hi2c->State= HAL_I2C_STATE_READY;
hi2c->Mode = HAL_I2C_MODE_NONE;
/* Process Unlocked */
__HAL_UNLOCK(hi2c);
return HAL_TIMEOUT;
}
}
}
return HAL_OK;
}
问题就在这里了,HAL_I2C_Mem_Write_IT本身是在一个task中调用的,而这个延迟的判定是通过while循环轮询的。
这样轮询有啥问题呢?乍一看好像没啥事情,FreeRTOS会耗尽时间片,从而自动切换任务,这里轮询就轮询了呗。但是实际上不是这样,这一个task没有任何主动切换线程的行为,很有可能会让低于他等级的线程无法正常工作,进而整个系统出问题。
分析
首先假设系统里有1,2,3,4,4个任务,其中1,2是三级任务,3,4是二级任务,我们假设I2C是任务1,当他时间片消耗完后,切换到任务2运行。
当任务2运行结束后,由于I2C这里是个while,加上优先级是最高,就绪状态,那么调度排名永远是第一,只要他进入调度除非有其他三级任务,否则他一定是第一个执行的,他一直不释放cpu,那么所有2级任务就不能被执行。
可能会有人有疑问,这个不是有超时时间25ms吗?他肯定会释放cpu啊,但是实际上HAL_I2C_Mem_Write_IT被调用的频率是固定的,50Hz,也就是20ms执行一次,那么一旦出错了,这里TXIS标志位要等25ms。
当他超时退出以后,这个任务的下次执行时间又到了,那他又比其他2级任务高,那么他必然又是排第一,他又要执行,然后由于I2C这个被拉低,导致这里TXIS一定获取不到,一定会超时,那么这里就直接形成了一个死循环。
Timeout
这里就不得不仔细看一下HAL库这里为什么把i2c的timeout设置的这么长
HAL 库本身的I2C是可以支持256字节通信的,这个timeout其实只管了一个字节的传输时长的,对应到I2C的速度,一般常用的都是100Kbps
一个字节的时间其实非常短,1ms最多可以传输12.5字节,实际算上中间的stop或者ack之类的可能达不到这么多,但是传输个8字节/ms,还是很轻松的。
所以等待一次发送完成,完全用不了25ms,这里给的太多了。
基本上也没见过比100kbps低非常多的i2c了,这里建议官方库最好把这个内置的timeout调小一些,或者就让用户去设置,而不是内置。
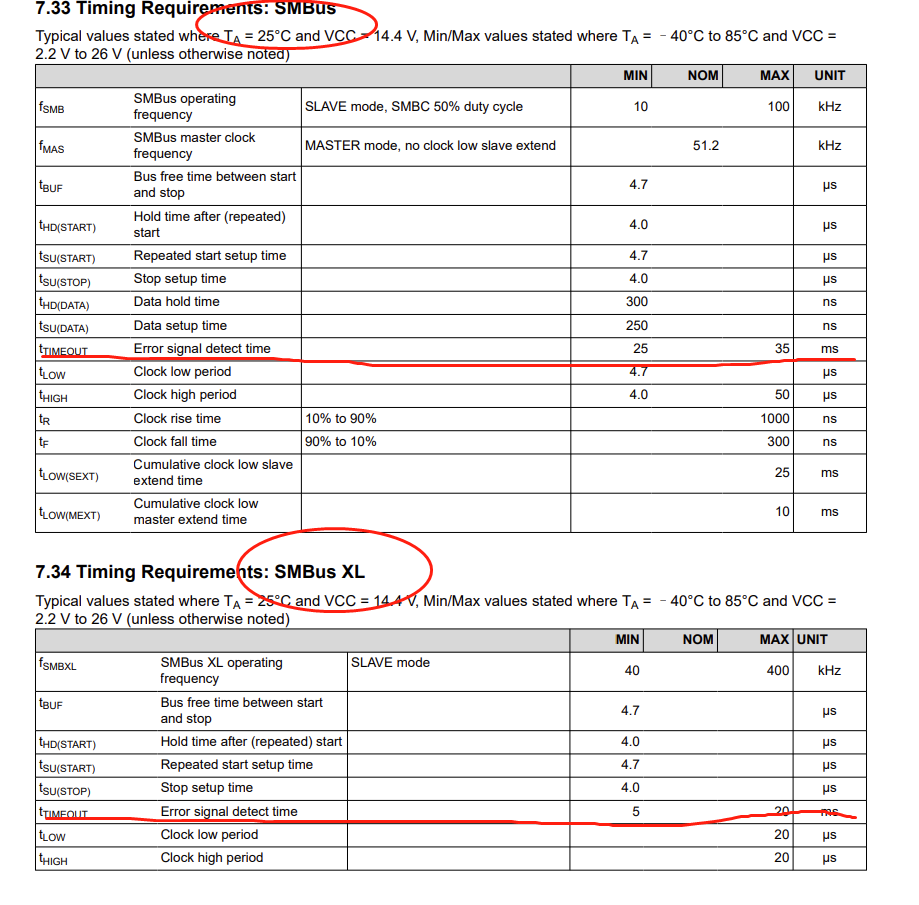
但是在一些SMBus或者一些芯片手册中,这个出错判断的时延时间是很长的,如果调小了,然后立马开始第二次通讯,会导致从设备可能会卡到某个状态中不能正常跑出来,所以这里需要具体芯片具体分析。粗暴的单方面降低一方的timeout可能并不能解决问题
拓展
实际上不仅仅是I2C的标志位是用while来判定的,并且没有任何释放操作,在SPI,SDMMC等函数中涉及到标志位的一些判定基本都是一个死循环,像I2C的超时时间预设的还不是特别长,我印象里有的函数的超时时间预设的是0xFFFFFFF,相当于死等,进去只要错过了标志位那么系统必然卡死,所以用的时候还是要多注意一下具体库的内部细节,否则这种问题查起来真的是要命。
Summary
当FreeRTOS与HAL库等结合的时候,能发生的问题是真的多,日后可能还会遇到各种奇怪的bug,建议以后用的时候最好都先单步走一遍全流程,确定一下没有涉及到cpu释放、多线程竞争的问题再用。
Quote
https://www.cnblogs.com/foxclever/p/6878588.html
https://blog.csdn.net/dldw8816/article/details/51579781