Foreword
最近要用DSHOT,然后就发现一堆问题,首先是DSHOT没有那种特别详细的介绍手册,基本全靠几个帖子和博客的内容,剩下的就是代码里内容,很多地方也没说清楚到底怎么弄。
DSHOT历史
首先随着时间的发展,DSHOT也越来越强了,目前来看应该是最强ESC协议了
平常ESC多数用的都是PWM,但是传统PWM也有问题,比如50HZ,那很明显,我控制频率可以达到400HZ的话,实际输出的控制信号却只有50HZ,那相当于剩下的频率都浪费了,对于反馈而言也不及时,所以这给整个控制系统带来了极大的延迟,首先是把pwm的频率提升到和控制输出频率相同的程度,那么就可以和控制信号兼容了,当然那会pwm基本已经可以输出400HZ,甚至更高。但是除了四轴,还有其他的各种模型可能也需要更高的输出频率,那么这个时候PWM就不够了。
后来就有了Oneshot,Multishot等等,不过最开始的是DSHOT150,然后DSHOT300,DSHOT600,现在的DSHOT1200。在这之前最强的应该是Multishot,当然对应协议的提升,也要求电调的控制板更强,从之前的8位,16位,到现在的32位单片机,并且时钟频率也从8Mhz,一直提升到了现在的48Mhz,72Mhz甚至更高。
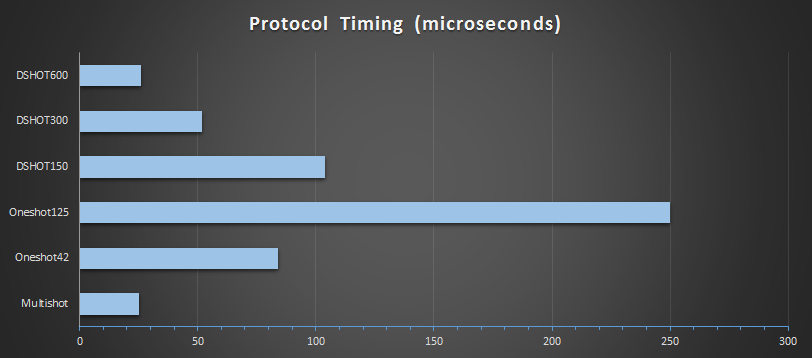
这些都是老图了,可以看到DSHOT600已经非常接近Multishot了,而DSHOT1200直接碾压
DSHOT将模拟信息作为数字信号来处理,自然就让电调也进一步,平常电调都需要校准油门行程,而DSHOT理论上可以不需要每次重新校准油门行程(实际上DSHOT也需要校准的,不过那不是我们做的)
DSHOT评价
简单说,好处是抗干扰,不用校准,随时切换正反转,可以拿到电调反馈信息,半有感,响应快,延迟低。
不方便的地方:对于主控的要求高,可能要多一根线,电调成本增高(需要增加电流相关芯片)
DSHOT支持
最初DSHOT是kiss飞控的电调开发者提出来的,后来大家广泛支持了DSHOT协议,由于BLHli使用的最广,后续大部分BLH32的电调都支持了。后续kiss还基于DSHOT开发一些私有的command,这一部分没有被BLH接受,所以存在两部分不同的DSHOT版本,Betafly的代码中可以看到类似的区分
DSHOT协议
DSHOT协议本身将原本的模拟信号转变成了数字信号,并且加入了校验位,其单loop时间足够快,分辨率高,有校验,同时还有telemetry作为反馈。
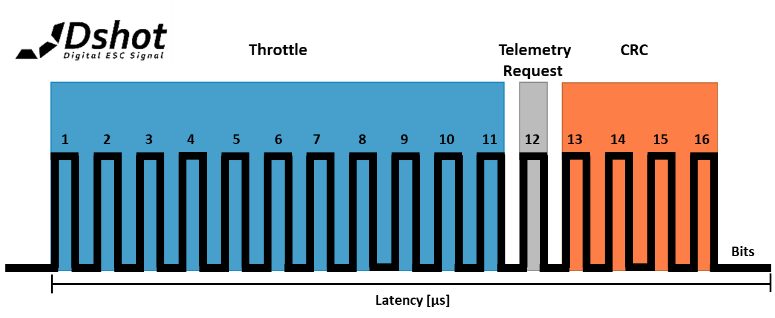
DSHOT本身一个完整控制帧,是16bits,其中11bits用来表示油门,1bit表示telemetry,4bits表示crc校验
| bit | 11bits | 1bit | 4bits |
|---|---|---|---|
| 表示范围 | 0-2047 | 0-1 | 0-15 |
- 0,用于电调解锁,1-47是给telemetry用的
- 1-5,电调鸣叫,低频->高频
- 6,ESC 版本信息或者是序列号,通过telemetry返回
- 7,8是对应两个旋转方向,做双向控制使用的
- 9,10,3d模式开关,9关,10开
- 11,获取esc 配置
- 12,保存esc 配置
- 13,telemetry扩展信息打开,就是反馈温度、电压、电流
- 14,扩展信息关闭
- 20,21也是切换自选方向,不知道和7,8有什么区别
- 22-29,3个LED的亮灭控制
- 30,音频流传输开关,仅限kiss电调
-
31,静音模式开关,仅限kiss电调
- 48到2047则是对应真实的油门0-1999,这样油门就有2000的分辨率,大部分情况下应该说够用了。
然后后面的4bits crc校验可以防止给出错误帧导致电调给出错误的控制信号(实际电调内部还有一个根据输入,转换到PID电机输出的东西)
既然是数字信号,那么对于0和1的定义就是必须要有的,其实这里0和1是按照占空比来区分的。75%左右的占空比就是1,37.5%左右的占空比就是0.
如下图所示。
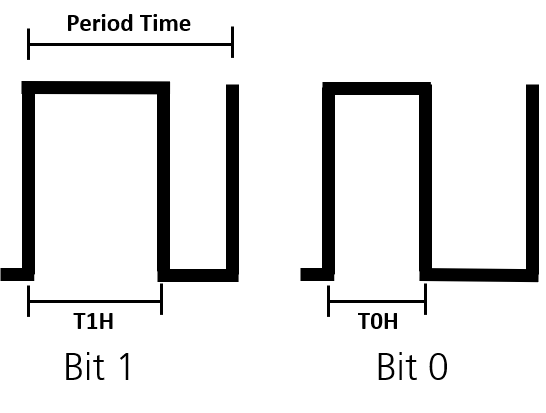
这样原本的模拟信号就组测了一个个数字bit,从而形成一个完整信号帧,这里的75%要求不是很严格,稍微多一些少一些都能正常识别

而有了上面的基础协议以后,DSHOT剩下的就是规定实际每个bit的时间 ,就可以决定输出的频率等信息了。
| 模式 | 比特率 | 输出频率 | 单bit时间 | 1的高电平时间 | 0的高电平时间 |
|---|---|---|---|---|---|
| Dshot 150 | 150 Kbit/s | 4.05 kHz | 6.67 µs | 5.00 µs | 2.50 µs |
| Dshot 300 | 300 Kbit/s | 8.09 kHz | 3.33 µs | 2.50 µs | 1.25 µs |
| Dshot 600 | 600 Kbit/s | 16.0 kHz | 1.67 µs | 1.25 µs | 0.625 µs |
| Dshot 1200 | 1200 Kbit/s | 32.0 kHz | 0.83 µs | 0.625 µs | 0.313 µs |
(这里的输出频率仅供参考,实际可能比这个略高或者略低都可以正常工作)
这个图里的单bit时间和0,1的表示都是按照,1,0.75,0.375来表示的,而理论频率其实可以根据bit时间来反算,比如Dshot 600时,实际输出一个loop需要80/3 us,可以得到理论频率大概是37.5khz,这个频率就已经非常高了,但是实际上并不可以。实际使用的时候,每帧之间需要一个间隔时间,用来区分2帧。而DSHOT600,官方没有给明确的时间,多数人都是从某个帖子里看到的要给的时间是2us左右。
这里我说明一下,实际并不是2us,应该是3个bit时间,取决于使用的模式,DSHOT1200可能需要更多一点4bit时间,这个都是我实际测试的结果(有可能受到电调和电机的实际情况影响,需要自行测试)。多个开源飞控里的我看到都是至少3bit时间,如果少于3bit时间,输出相同的油门,可以看到电机明显的顿挫,而时间给够以后明显流畅了。实际输出的频率自然也会随着这3bit降低,大概就变成了31.5khz,我实测是ok的。
2023.4.10,其实Dshot协议已经不再限制速率了,基本上只要你的协议是正确的,任何速度的Dshot都可以被正确识别并工作。目前上限速度是 Dshot 2400,超过这个可能识别不了
CRC
既然这里有CRC,然后无论哪里都不具体说用的是啥CRC,下面是实际4位crc的算法,packet中是只有油门的,没有telemetry,可能需要根据情况设置telemetry
uint16_t add_checksum_and_telemetry(uint16_t packet) {
uint16_t packet_telemetry = (packet << 1) | 0;
uint8_t i;
int csum = 0;
int csum_data = packet_telemetry;
for (i = 0; i < 3; i++) {
csum ^= csum_data; // xor data by nibbles
csum_data >>= 4;
}
csum &= 0xf;
packet_telemetry = (packet_telemetry << 4) | csum;
return packet_telemetry; //append checksum
}
解锁
一般支持DSHOT的都是BLH的电调了,然后DSHOT解锁比较特殊,和平常的PWM直接给输出就转不一样。
DSHOT必须先给0,持续3s,不是0油门,而是全bit=0,对电调进行解锁以后才能开始运转
平常的PWM是必须先给0解锁,保持一会就可以随意加油门了
切换了输出协议也要这样来一下,比如PWM切换到DSHOT或者OneSHOT切换到DSHOT,都要重新做一次解锁
telemetry
有一些电调支持返回当前电调和电机的信息,比如温度、电压、电流、累计电流总量、转速等信息。
相当于是在没有编码器的情况,让这个电机成为半有感电机了,由于这些信息本质上是来自于电调,所以有可能是不准确的,甚至发生短路或者某些特定异常的时候电调不一定能检测出来。
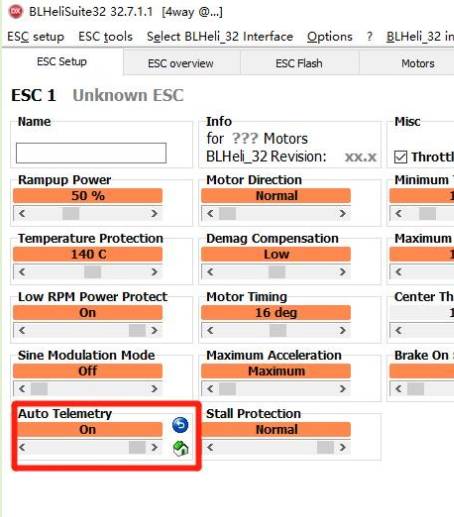
要使用telmetry,还需要电调支持一个输出接口,这个接口也使用相同的dshot协议进行数据传输。只有在输出的dshot里置位了telemetry,才会有信息返回。
同时电调的设置里也要开启回应telmetry才行
有了这些基础,DSHOT基本就可以正常工作了
DSHOT的telemtry的具体含义定义得去源码里参考,这里我没有使用,暂时给不了
STM32 HAL DMA PWM 输出bug
实际使用DSHOT的时候就会发现一点小问题,由于DSHOT可以输出的频率非常高,而要每时每刻去变timer中的ccr显然不能单线程死循环跑,太影响性能了。这里就要用DMA来实现自动喂CCR寄存器。
这里做设计就要注意一下,ST的DMA是有限的,并且有的通道可能只有一个选择,不能切到其他DMA或者换通道,而且DMA是一对一的,不能相同通道相同流同时使用,这就要提前规避,不然最后DSHOT输出不了。
DMA timer的例程,官方就有好多个,但是都是单通道输出,如果只是单通道肯定也没啥问题,但我这里要用的是4通道,并且是用HAL库的函数来做的,然后我就发现貌似同一时刻只有一个通道工作
这个是普通PWM开始输出的函数,可以看到没啥大问题
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel)
{
/* Check the parameters */
assert_param(IS_TIM_CCX_INSTANCE(htim->Instance, Channel));
/* Enable the Capture compare channel */
TIM_CCxChannelCmd(htim->Instance, Channel, TIM_CCx_ENABLE);
if(IS_TIM_ADVANCED_INSTANCE(htim->Instance) != RESET)
{
/* Enable the main output */
__HAL_TIM_MOE_ENABLE(htim);
}
/* Enable the Peripheral */
__HAL_TIM_ENABLE(htim);
/* Return function status */
return HAL_OK;
}
这里是对应的DMA的PWM输出方式,DMA PWM开始工作的要求是timer必须是ready状态的,而实际上只要开了一个通道,就会导致他将timer状态修改成busy,然后其他通道全都用不了。
无论DMA输出模式是normal还是circle模式,都会被这个busy给强制退出
HAL_StatusTypeDef HAL_TIM_PWM_Start_DMA(TIM_HandleTypeDef *htim, uint32_t Channel, uint32_t *pData, uint16_t Length)
{
/* Check the parameters */
assert_param(IS_TIM_CCX_INSTANCE(htim->Instance, Channel));
if((htim->State == HAL_TIM_STATE_BUSY))
{
return HAL_BUSY;
}
else if((htim->State == HAL_TIM_STATE_READY))
{
if(((uint32_t)pData == 0 ) && (Length > 0))
{
return HAL_ERROR;
}
else
{
/*
* DMA work in circle mode
* there is a bug that PWM start DMA will lock the timer
* just one channel work other blocked
* you could remove the code or add a state at the end
* so here i add a HAL_TIM_STATE_READY state at the end
* */
htim->State = HAL_TIM_STATE_BUSY;
}
}
switch (Channel)
{
case TIM_CHANNEL_1:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC1]->XferCpltCallback = HAL_TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC1]->XferErrorCallback = HAL_TIM_DMAError ;
/* Enable the DMA Stream */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC1], (uint32_t)pData, (uint32_t)&htim->Instance->CCR1, Length);
/* Enable the TIM Capture/Compare 1 DMA request */
__HAL_TIM_ENABLE_DMA(htim, TIM_DMA_CC1);
}
break;
case TIM_CHANNEL_2:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC2]->XferCpltCallback = HAL_TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC2]->XferErrorCallback = HAL_TIM_DMAError ;
/* Enable the DMA Stream */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC2], (uint32_t)pData, (uint32_t)&htim->Instance->CCR2, Length);
/* Enable the TIM Capture/Compare 2 DMA request */
__HAL_TIM_ENABLE_DMA(htim, TIM_DMA_CC2);
}
break;
case TIM_CHANNEL_3:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC3]->XferCpltCallback = HAL_TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC3]->XferErrorCallback = HAL_TIM_DMAError ;
/* Enable the DMA Stream */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC3], (uint32_t)pData, (uint32_t)&htim->Instance->CCR3,Length);
/* Enable the TIM Output Capture/Compare 3 request */
__HAL_TIM_ENABLE_DMA(htim, TIM_DMA_CC3);
}
break;
case TIM_CHANNEL_4:
{
/* Set the DMA Period elapsed callback */
htim->hdma[TIM_DMA_ID_CC4]->XferCpltCallback = HAL_TIM_DMADelayPulseCplt;
/* Set the DMA error callback */
htim->hdma[TIM_DMA_ID_CC4]->XferErrorCallback = HAL_TIM_DMAError ;
/* Enable the DMA Stream */
HAL_DMA_Start_IT(htim->hdma[TIM_DMA_ID_CC4], (uint32_t)pData, (uint32_t)&htim->Instance->CCR4, Length);
/* Enable the TIM Capture/Compare 4 DMA request */
__HAL_TIM_ENABLE_DMA(htim, TIM_DMA_CC4);
}
break;
default:
break;
}
/* Enable the Capture compare channel */
TIM_CCxChannelCmd(htim->Instance, Channel, TIM_CCx_ENABLE);
if(IS_TIM_ADVANCED_INSTANCE(htim->Instance) != RESET)
{
/* Enable the main output */
__HAL_TIM_MOE_ENABLE(htim);
}
/* Enable the Peripheral */
__HAL_TIM_ENABLE(htim);
/*
* DMA work in circle mode
* there is a bug that PWM start DMA will lock the timer
* just one channel work other blocked
* you could remove the code or add a state at the end
* so here i add a HAL_TIM_STATE_READY state at the end
* */
htim->State = HAL_TIM_STATE_READY;
/* Return function status */
return HAL_OK;
}
这个busy状态直到DMA传输完成才会返回并且切换,这就导致这几路PWM无法同时输出
/**
* @brief TIM DMA Period Elapse complete callback.
* @param hdma: pointer to a DMA_HandleTypeDef structure that contains
* the configuration information for the specified DMA module.
* @retval None
*/
static void TIM_DMAPeriodElapsedCplt(DMA_HandleTypeDef *hdma)
{
TIM_HandleTypeDef* htim = ( TIM_HandleTypeDef* )((DMA_HandleTypeDef* )hdma)->Parent;
htim->State= HAL_TIM_STATE_READY;
HAL_TIM_PeriodElapsedCallback(htim);
}
基于这个原因,我就在前面的函数退出前直接加了一个htim->State = HAL_TIM_STATE_READY,强制让timer此时可以正常工作。
DMA PWM输出第一个bit bug
这里讨论的不再是DSHOT了,而是单纯这个DMA输出PWM,在启动的一瞬间会出现2个0的情况,这个情况目前我解不了,应该是DMA的bug。
我之前是想直接用DMA PWM来模拟一个串口,直接输出串口信号,实际上我成功了,可以正常被识别。
但是这里会遇到一个问题,就是DMA首次输出的时候会出错,我是用circle模式,如果是normal模式的话,每次调用start的时候都会出错。
正常串口协议是这样的:
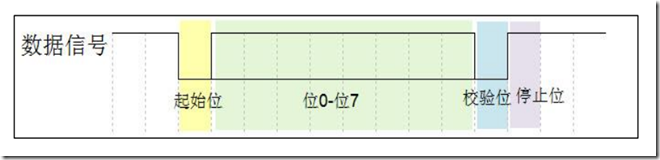
姑且不论后面的0-7位是0还是1,而我实际从示波器上看到的是这样的:
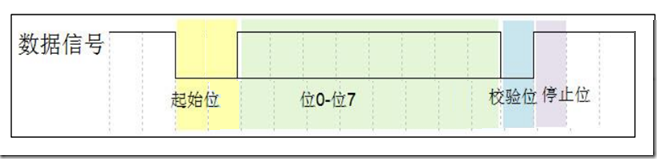
也就是第一个起始位0,被输出了2个0,如果是circle模式,后面无论输出多少个0或者起始位,都不会再出现这个问题。
只要重新开启DMA或者重新激活PWM输出,那么输出的第一个bit就一定会出现这个问题。
正常来说输出0的时候,就是ccr为0,period的值如果为1000,然后输出就是0了,要避免第一bit出错,那么还有个办法,就是原本的0不用0,而是用1,这样识别起来还是0,虽然从示波器上会看到每个0前面有一个小毛刺,而如果要输出的是其他任何不为0的值,那么一定不会出错,只有第一次输出0的时候出错。
这个问题无论怎么调整DMA或者timer的极性或者其他设置都没用,只会让第一个出错的变成2个1或者2个0,肯定会出错,只要DMA一启动这个错误的bit就会出现。
DMA PWM输出切换延迟
我实际想要实现的是单线DMA PWM模拟串口输入和输出,输出没有大问题,但是模拟输入的时候就有明显问题了,从DMA PWM输出模式切换到普通IO的模式的过程花费的时间超过了52us,导致实际使用19200波特率的情况下,单线串口输入的时候,信号丢失了。
某种程度上说目前的HAL库还是太重型了,虽然带来了一部分好处,比如统一配置,统一回调,更多的东西变成了一种约定(类似于springboot),你知道你就能正常用,你不知道你就用的很奇怪。好处是HAL的代码至少写的比你健壮一些,但是坏处就是有很多冗余性的东西,导致了现在的性能问题,甚至有的HAL内部问题,如果不仔细看底层实现是发现不了的。
End
除了上面这个错以外,其实还有DMA帧错误,实际上帧错误是使用FIFO才会出现的,而FIFO是disable的,但是初始化以后还是默认开启了帧错误中断,这就是很多人明明没用FIFO但是却在DMA完成回调时看到了帧错误的错误回调,而这个问题貌似也已经好多年了都没修复,不知道为什么
而我看到了chibiOS等系统直接将板级资源重新定义,然后自己实现一个hal库,剩下的就是根据硬件去实现对应的hal库这种方式感觉更集中一些,在应用层屏蔽底层更完全一些,而且可以调用的系统资源也相对更完整一些。
Quote
https://www.youtube.com/watch?v=EQJgh-o-uHo
https://github.com/betaflight/betaflight/wiki/DSHOT-ESC-Protocol
https://dmrlawson.co.uk/index.php/2017/12/04/dshot-in-the-dark/
https://www.rcgroups.com/forums/showthread.php?2756129-Dshot-testing-a-new-digital-parallel-ESC-throttle-signal
https://blog.seidel-philipp.de/dshot-digital-esc-signal/
https://www.speedgoat.com/help/slrt/page/io_main/refentry_dshot_usage_notes
https://blck.mn/2016/11/dshot-the-new-kid-on-the-block/
http://kiss.flyduino.net/dshot-new-digital-protocol-for-kiss/
https://github.com/bitdump/BLHeli/issues/234