Foreword
要实现一个寻路,地图要如何描述或者结构化,这个非常重要,当然也和我们选择的寻路算法有关系,主要是为了寻路算法服务的。
地图离散化
寻路算法是基于地图进行搜索的,而往往地图的信息过于复杂的时候,之前说过的算法实际应用非常慢,而基于这样的情况,自然就可以用我们的离散数学了。
首先就要考虑如何降低地图中的信息量,比如我地图是10000*10000的二维,而要基于这个进行搜索就要非常久了,消耗的内存也不少,如果维度变高,就是指数级增长了,要解决这个问题,就要先把地图离散化,然后想办法排除掉无用信息,尽可能的少而快。
Grid
简单说就是将地图栅格化,有些栅格是有障碍的,有的是没有的,从而让地图包含他们,将原本连续的地图变成离散的模式,一个二维数组就能装得下这个地图的数据,然后再用寻路算法根据这个来搜索。
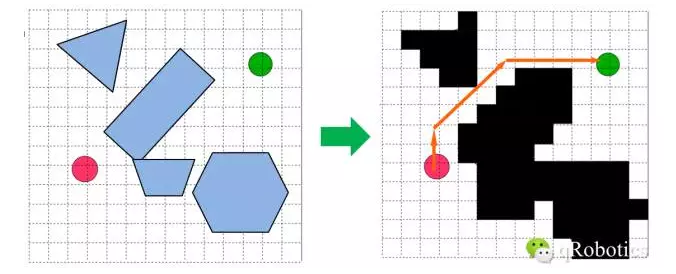
但是对于游戏或者某些实际应用场景来说这样的栅格化还是不够,一方面是精度不够用,一方面是栅格后可能依然搜索范围太大了,导致实际无法完成。
Chunk
如果地图非常大,并且无缝连接,要怎么办,可以通过分片来完成,简单说就是分治思想,地图分片处理,然后将分片后的结果再进行一下寻路,这样通过提高维度下降了寻路的范围,缩短了寻路时间
Road Maps
路图法,是基于Grid的,本身是在Grid后的地图上选择一些点,作为路径的途径点,然后再通过算法将途径点连接起来,从而形成寻路的。以前的老游戏甚至需要人工标注地图中的途径点,然后才能被配置到寻路中。
这其中也出现了一些比较有名的算法,他们使用Road Maps地图策略,然后再结合搜索算法,进行寻路。
PRM
随机选取途径点,然后连起来,排除跨过障碍物的边,这里看起来就非常离散化了,并且和图论中的点很像了,
然后基于随机选取的路径点寻找一条线路 。但是这样得到的路径可能很好,也可能很差,随机性太高了。
RRT
基于PRM的基础上,将整个图的结构变成树形的,然后基于树形进行扩展,最后得到一条路径,这种方法速率非常快,得到的线路也比PRM更合理一些

Road Maps还有一个问题就是得到的路径可能非常扭曲,不平滑,实际执行的时候需要再次进行平滑。
Visibility Graph
可视图法
https://blog.csdn.net/qq_36549512/article/details/80457777
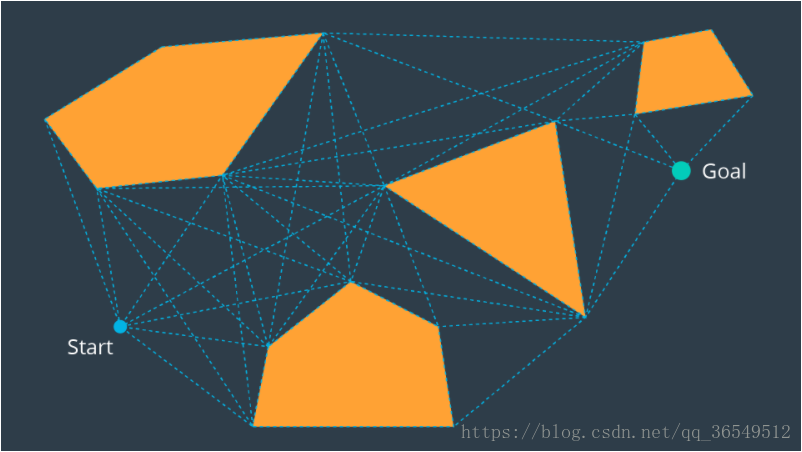
可视图法比较特殊,它相当于是从上帝视角俯瞰整个地图,然后将地图中所有障碍物的边角连接起来,最终他们中不和障碍物穿插的边被留下了。再以这些边和顶点构建图,进行图搜索,从而得到最终的路径。同理于PRM,他得到的比较稳定一些,但是可能多数情况下都不是最优,还有一个问题就是凹多边形会出现问题。
Navmesh
某种程度上说Navmesh其实就是Visibility Graph,只是他多用在游戏领域,适合2d的地图离散化,并且只要没有凹多边形,基本上可以完美胜任,路径点少,搜索效率极高,他与Visibility Graph不同的地方在于只要是地图中内覆盖的任何一点,都是可行点,可以到达的,适合动态实时切换目标点
https://www.zhihu.com/question/20298134
算法完备性
这里再总结一下算法的完备性和最优性,类似或者拓展的算法就不单独标注了
- 完备,总能找到解
- 最优,能找到最优路径
| 算法 | 完备 | 最优 |
|---|---|---|
| Dijkstra | 是 | 是 |
| Astar | 是 | 是 |
| 蚁群算法 | 是 | 是 |
| 人工势场法 | 否,存在局部极小值 | 否 |
| PRM | 概率 | 否 |
| RRT | 概率 | 否 |
| Visibility Graph | 是 | 是 |
| Navmesh | 是 | 否 |
当然实际的使用中,完备与否,最优与否都与应用有关系。游戏里多数情况下只要完备即可,最优不一定。而在工业或者其他行业里可能最优是最重要的,只是不一定能找到而已。大家都在完备的路上,追求最优的结果而已
Summary
最后总结一下,对地图进行离散化,大概就是上面的几种方法,傻瓜一点就Grid,复杂一些就用Road Maps。
同时Grid只适合低维度,小地图,而Road Maps适合高维度比如6维机械臂之类的进行规划,低维度当然也可以,只是有点杀鸡用牛刀的感觉。
到这里基本上可能会遇到的搜索或者路径算法就这些了,剩下都是在他们的基础上,添加限制之后,进行扩展或者优化,从而达到更好的效果,具体就去翻论文吧。
完成了地图离散以后,基本就能得到一条可行路径了,但是这个时候还需要目标沿着可行路径运动,那就是轨迹规划了。
Quote
https://mp.weixin.qq.com/s?__biz=MzA5MDE2MjQ0OQ==&mid=2652786406&idx=1&sn=f937dd6aa91344fed689baf51dc821ab&scene=21#wechat_redirect
https://zhuanlan.zhihu.com/p/104056027?utm_source=qq
https://zhuanlan.zhihu.com/p/54510444
https://blog.csdn.net/songyunli1111/article/details/78384096